
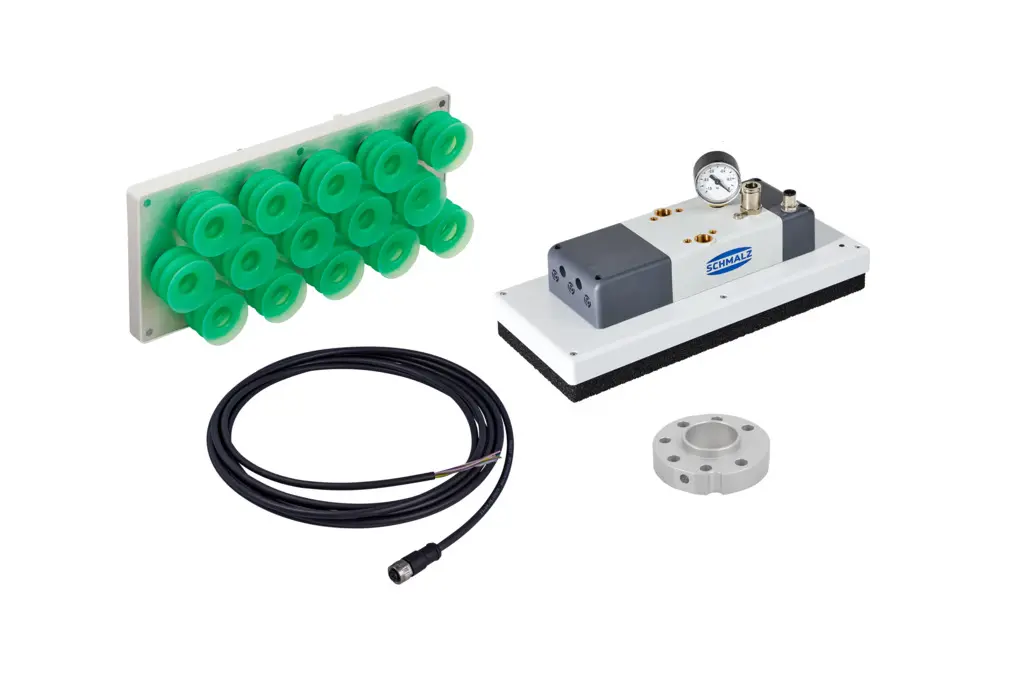







FQE RXc R 300x130 SW100 O20
Réf. article: 10.01.44.00644
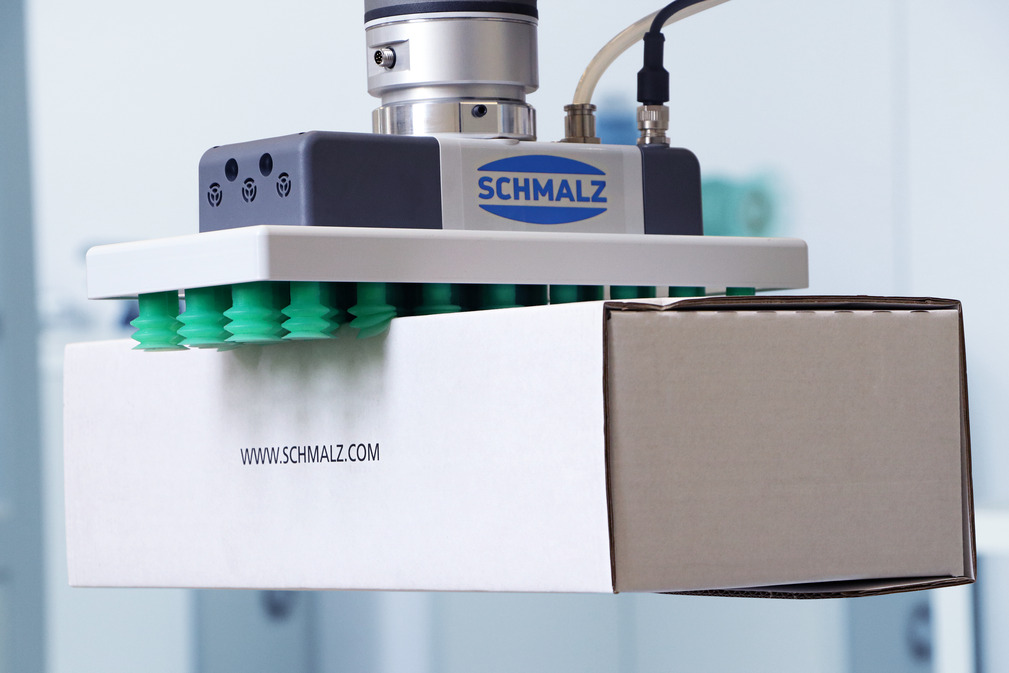
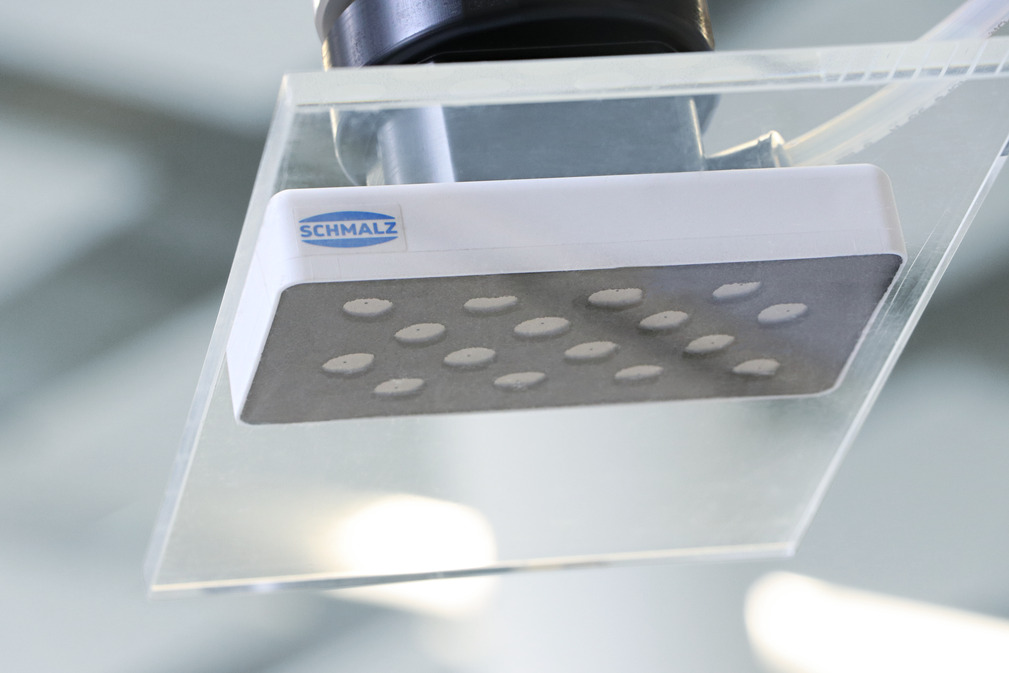
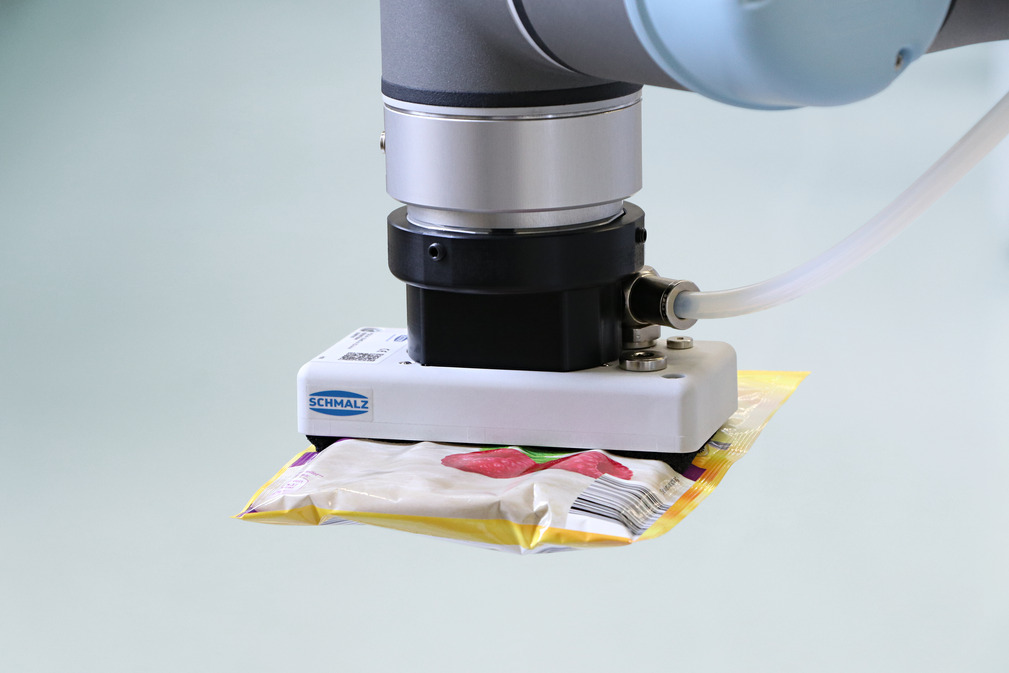
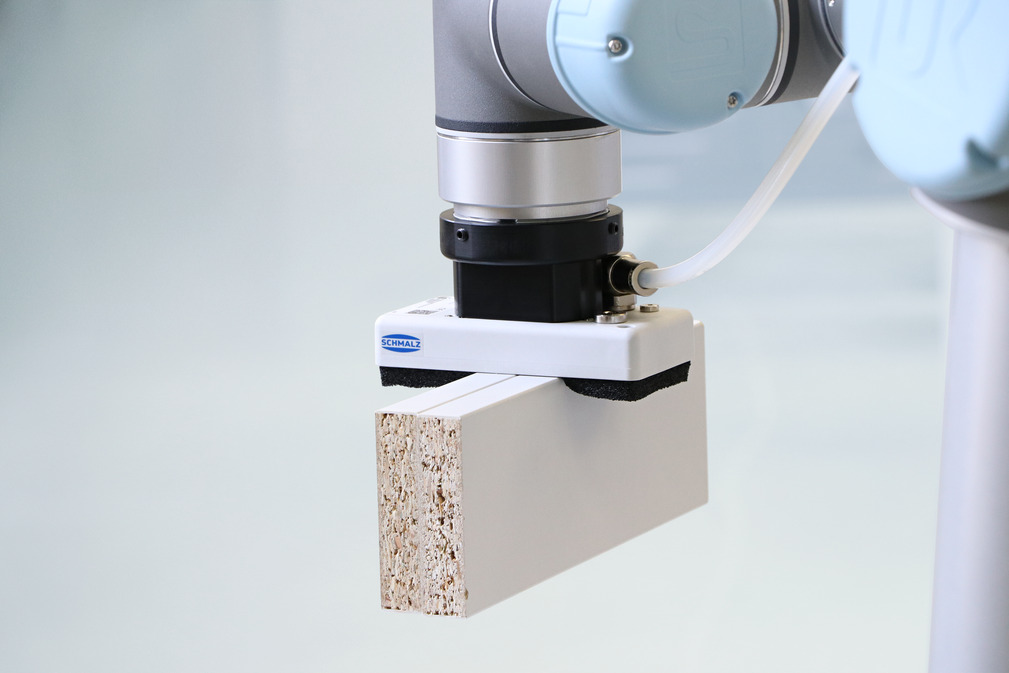
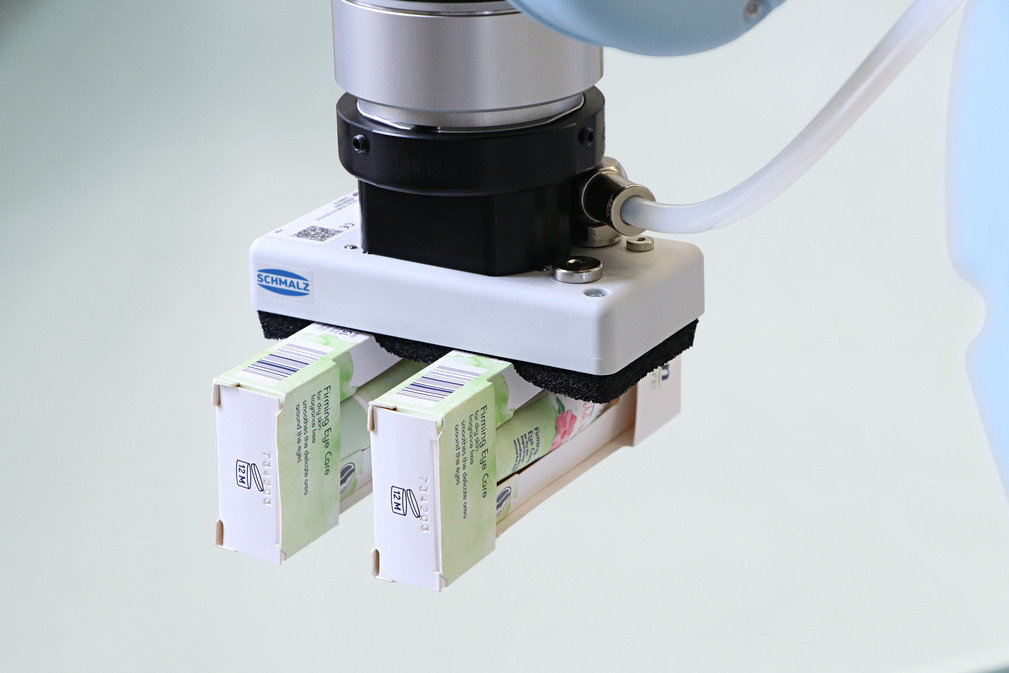
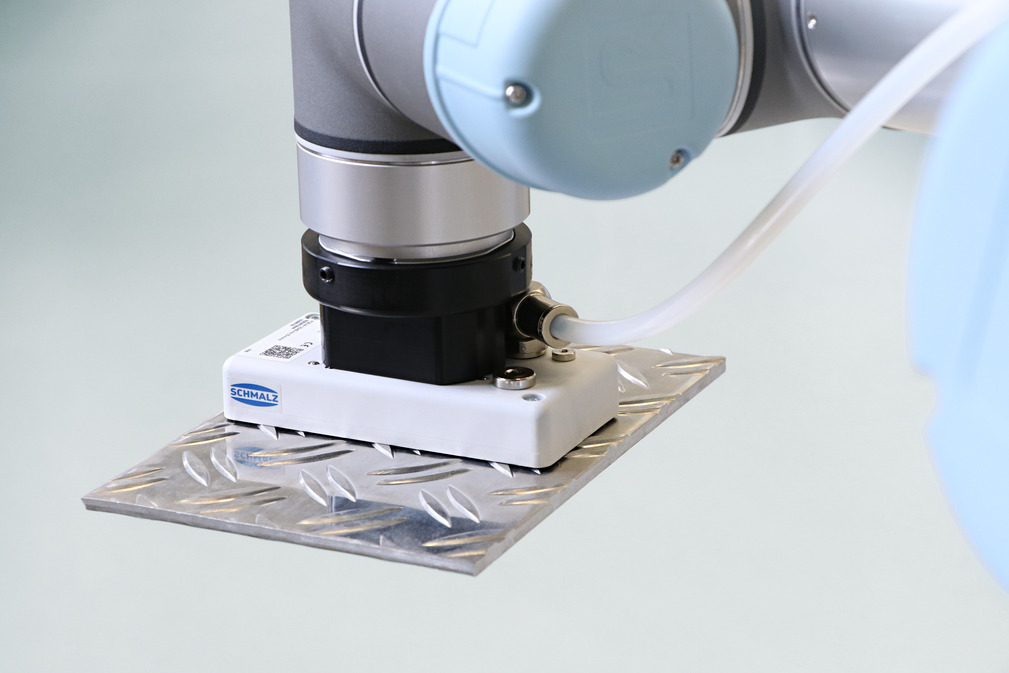
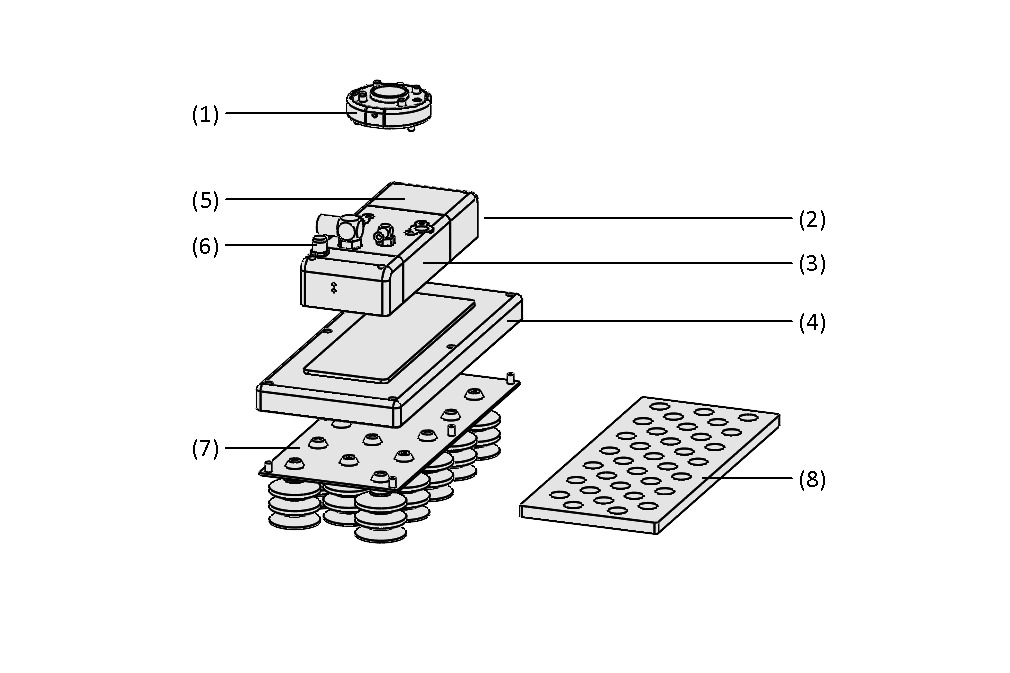
Système de préhension par le vide à grande surface avec résistances d'écoulement
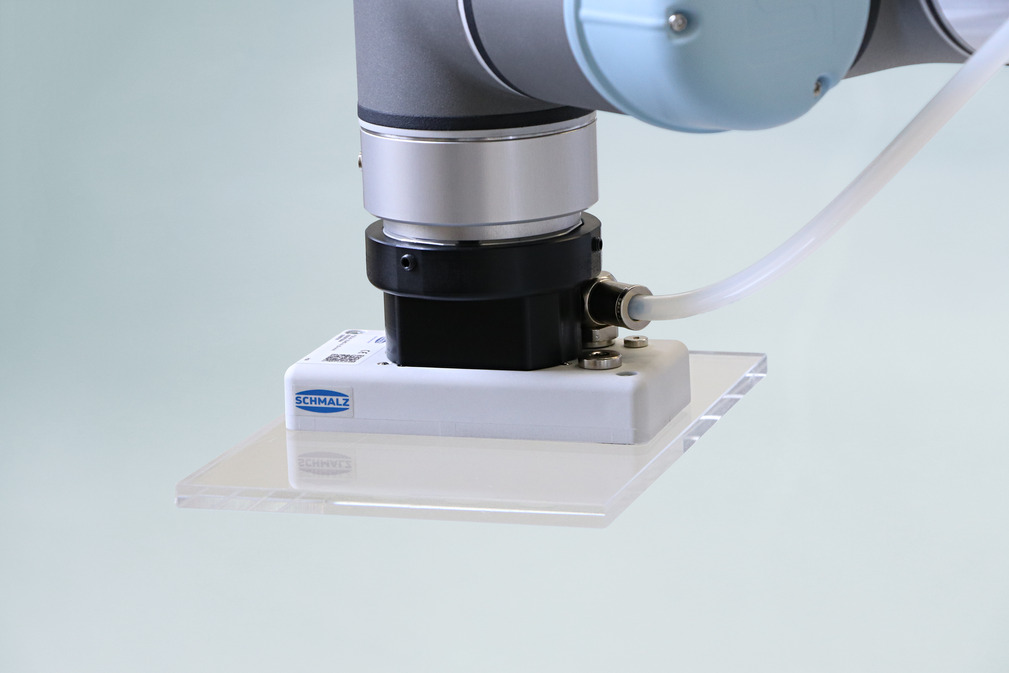
| Forme | génération du vide intégrée / ensemble Rob |
| Fonction | controlled |
| por | ABB Robotics |
| Type | CRB15000 |
| Formulaire | Rectangulaire |
| Longueur L | 300 (mm) |
| Largeur B | 130 (mm) |
| Hauteur H | 86 (mm) |
| Type de vanne | Restriction au flux |
| Diamètre de la buse | 1 (mm) |
| Nombre de cellules d'aspiration | 35 |
| Type de matière | Mousse ouverte, hauteur 20 mm |
| Construction d'un générateur vide | Module d'éjecteur SEP |
| Vanne de commande | Sans courant, ouvert |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Poids propre | 2.021 (kg) |
