Vacuum Suction Cups
- Our product range includes a variety of suction cups with various shapes, sizes and materials, providing the right suction cup for every application. Suction cups consist of a elastomer part and a connection nipple.
Show category
Vacuum suction cups are the link between the workpiece and the handling system. They consist of the suction cup (elastomer part) and a connecting element.
Read more about the shapes of the suction cups and their materials. You can also find an overview of materials there. Note that suction cups require special storage and cleaning procedures.
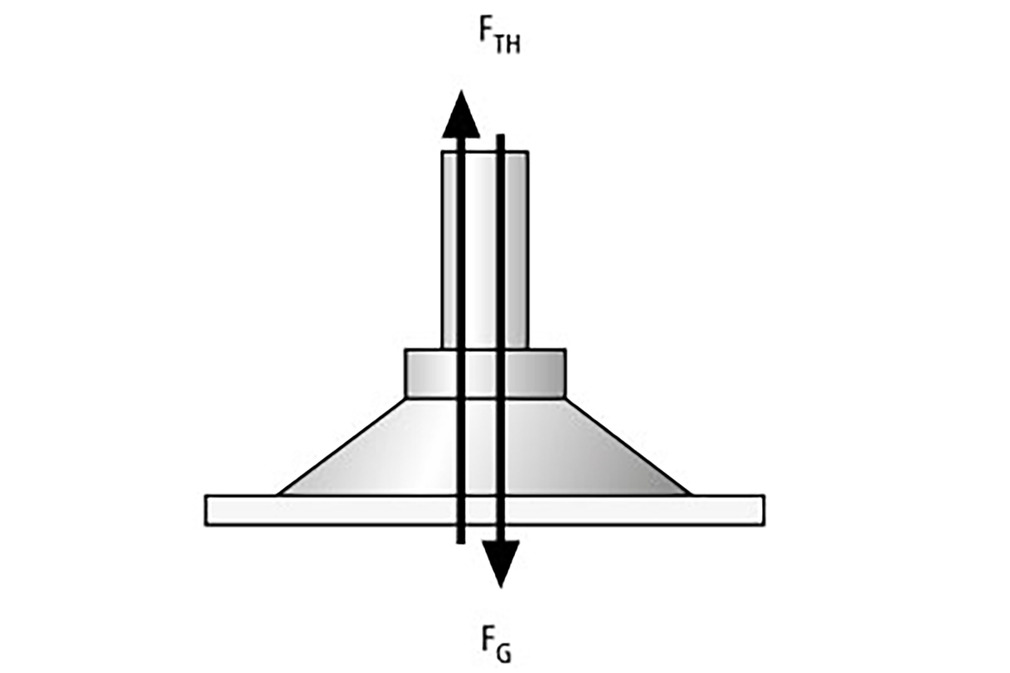
Suction cups are used to grip and move workpieces in a plant or on a robot. A suction cup does not attach itself to the surface of a workpiece. Instead, the ambient air pressure (atmospheric pressure) presses the suction cup against the workpiece as soon as the ambient pressure is greater than the pressure between the suction cup and the workpiece. This pressure difference is achieved by connecting the suction cup to a vacuum generator, which evacuates the air from the space between the cup and the workpiece. If the suction cup is in contact with the surface of the workpiece, no air can enter it from the sides and a vacuum is generated.
The holding force of the suction cups increases proportionally with the difference between the ambient pressure and the pressure inside the cup. The holding force of a suction cup is calculated with the formula:
F = Δp x A
F = Holding force
Δp = Difference between ambient pressure and pressure of the system
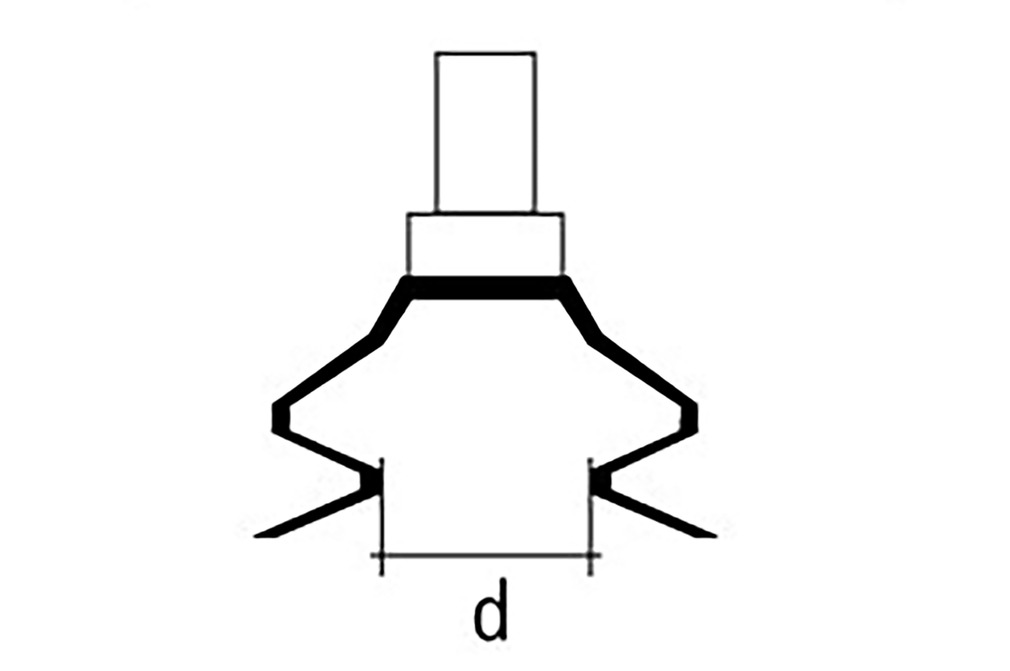
A = Effective suction area (the effective area of a suction cup under vacuum)
This means the holding force is proportional to the pressure difference and the suction area. The greater the difference between ambient pressure and pressure in the suction cup or the larger the effective suction area, the greater the holding force. The force can vary depending on a change of the pressure difference and area parameters.
Further information, in the form of technical data and different calculation examples of actual applications, is available for the design of individual components.
Our selection aid includes information that should be observed when selecting the right vacuum suction cup.