
Manipulación automatizada • Sistemas de planos aspirantes FXP
¿Cómo...? Diseño especial FXP/FXP-S con función de separación
Este vídeo muestra cómo configurar la función de separación de los sistemas de planos aspirantes FXP / FXP-S. El diseño especial con función de separación se ha desarrollado para recoger, separar o mover varias piezas de forma individual y selectiva. Esto hace que el sistema sea ideal para procesos de recoger y colocar, automatización de envases o aplicaciones de clasificación.
Consultas de productos
Vídeos
Descubra ejemplos de aplicación del producto en diversos sectores: fáciles de usar, informativos y prácticos.
¿No ha encontrado vídeos adecuados? Entonces eche un vistazo a nuestro centro multimedia.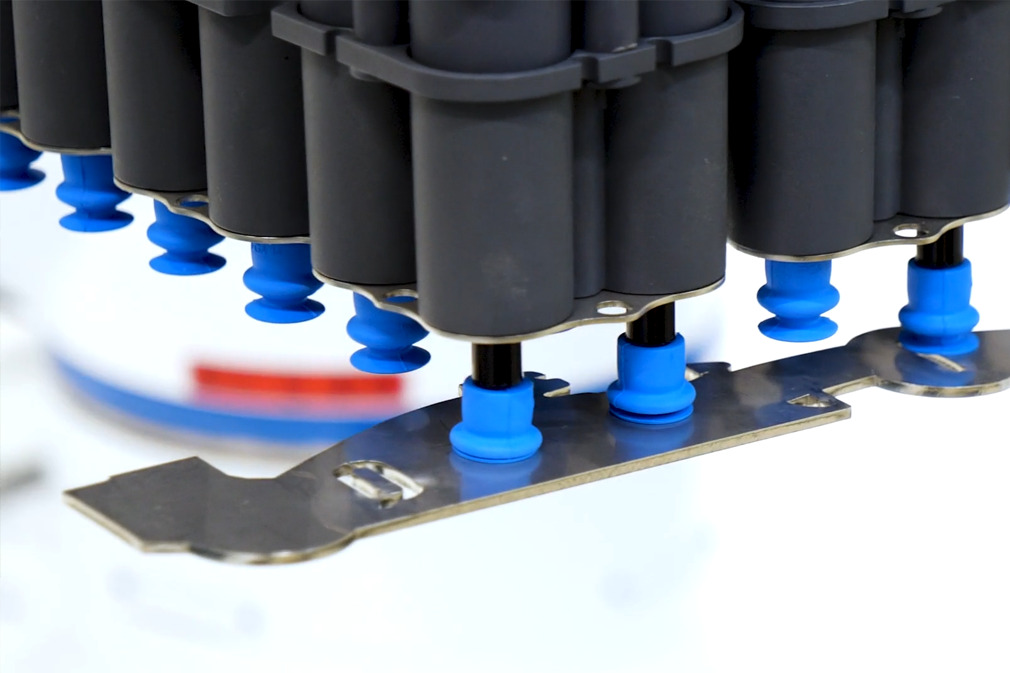
Ver el vídeo
Solution Kit ivOS Sheet Metal - 0275

Ver el vídeo
Garras magnéticas SGM-HPm en el proceso de desapilado - 0277

Ver el vídeo
¿Cómo...? Integrar Compact Terminal SCTSi en Siemens SPS - 5116

Ver el vídeo
CobotPump ECBPMi Black Edition para robots ligeros igus Rebel - 0264

Ver el vídeo
¿Cómo...? Mini Terminal Compacto SCTMi ajustes para cambios de eyector usando la App NFC - 5129

Ver el vídeo
¿Cómo...? Montaje de ventosas de fuelle SAOXB - 5127

Ver el vídeo
Sistemas de ventosas de planos aspirantes FA-X / FA-M - 0278
Ver el vídeo
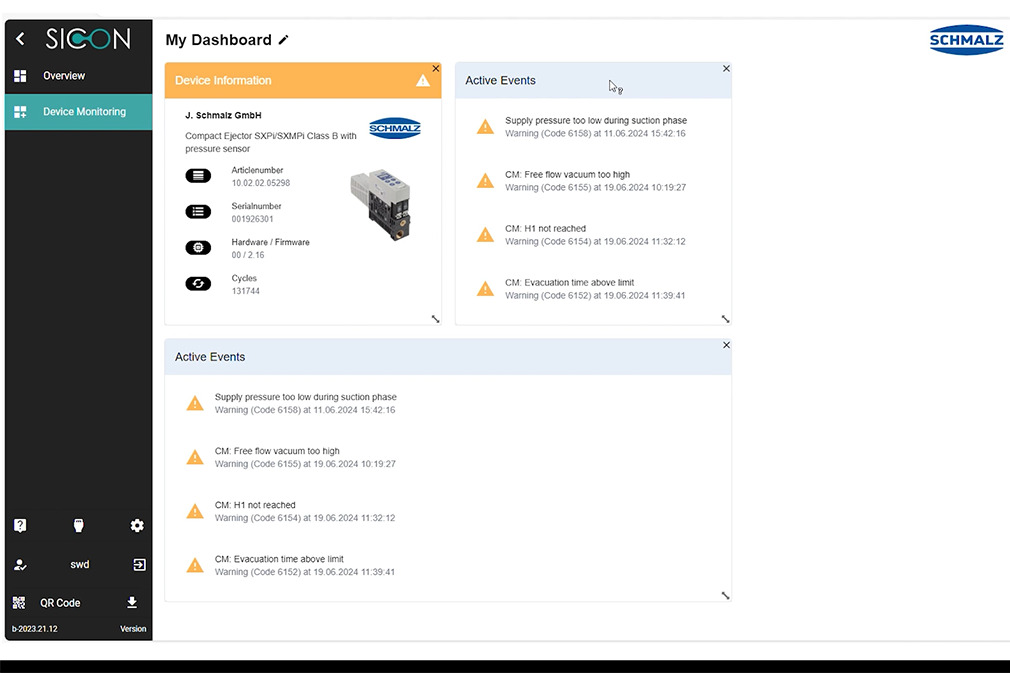
Schmalz Connect Suite - Supervisión de dispositivos - 5126