







En savoir plus maintenant
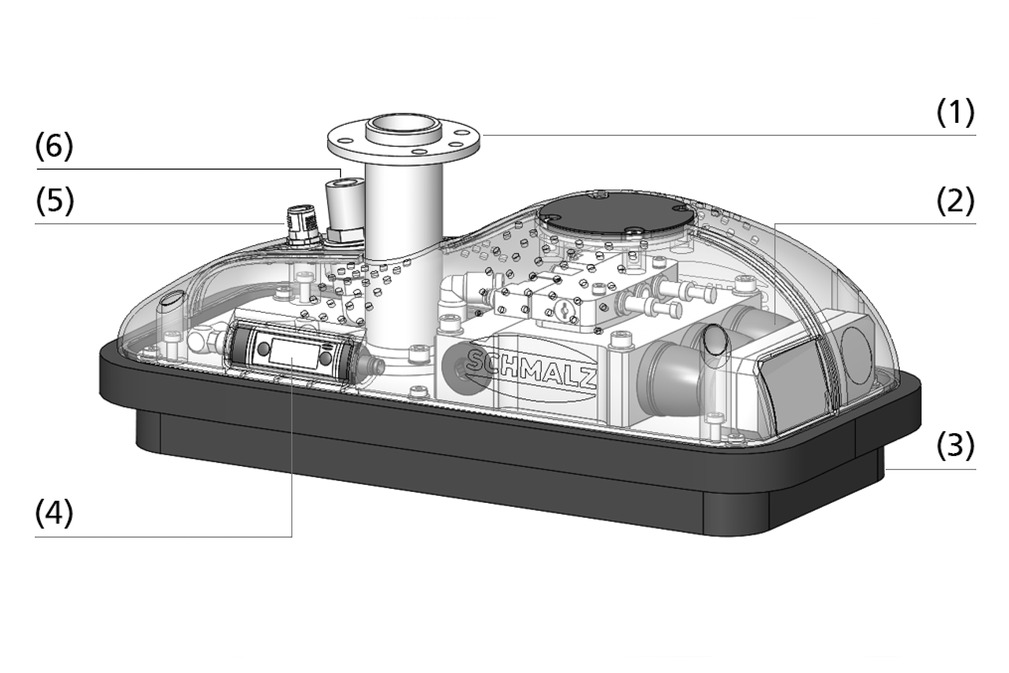
L'ensemble comprend tous les composants pour construire un préhenseur prêt à être raccordé.
L'interface NFC permet un accès rapide aux données de l'appareil via un smartphone
Charge maximale utile élevée avec une construction légère et dynamique grâce à la fabrication additive (impression 3D)
La communication via IO-Link permet une intégration et une surveillance facile du préhenseur
La documentation relative à ce produit est disponible dans cette section.
| Documents | Langue |
|---|---|
| Français |
La documentation est également disponible dans son intégralité en anglais.
| Documents | Langue |
|---|---|
| Anglais |
1 - 10 de 22 résultats

Réf. article: 10.01.43.00183
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | YASKAWA |
| Type | HCP10DTP, HCP20DTP ≥2022 |
| Pressostat et vacuostat de type construction | Contacteur NPN |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00159
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | Doosan Robotics |
| Type | Serie M,A,H |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00160
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | Doosan Robotics |
| Type | Serie M,A,H |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00149
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | FANUC |
| Type | CRX |
| Pressostat et vacuostat de type construction | Contacteur NPN |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00148
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | FANUC |
| Type | CRX |
| Pressostat et vacuostat de type construction | Contacteur NPN |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00066
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | FANUC |
| Type | CR-15iA |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00130
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | FANUC |
| Type | CR-15iA |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00186
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | Kassow |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00185
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | Kassow |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Vanne de commande | Sans courant, ouvert |

Réf. article: 10.01.43.00065
Système de vide complet pour la connexion à des robots légers
| avec | Préhenseur de surf FXCB |
| por | KUKA |
| Type | iiwa 7,14 |
| Pressostat et vacuostat de type construction | Contacteur PNP |
| Vanne de commande | Sans courant, ouvert |