







Más información
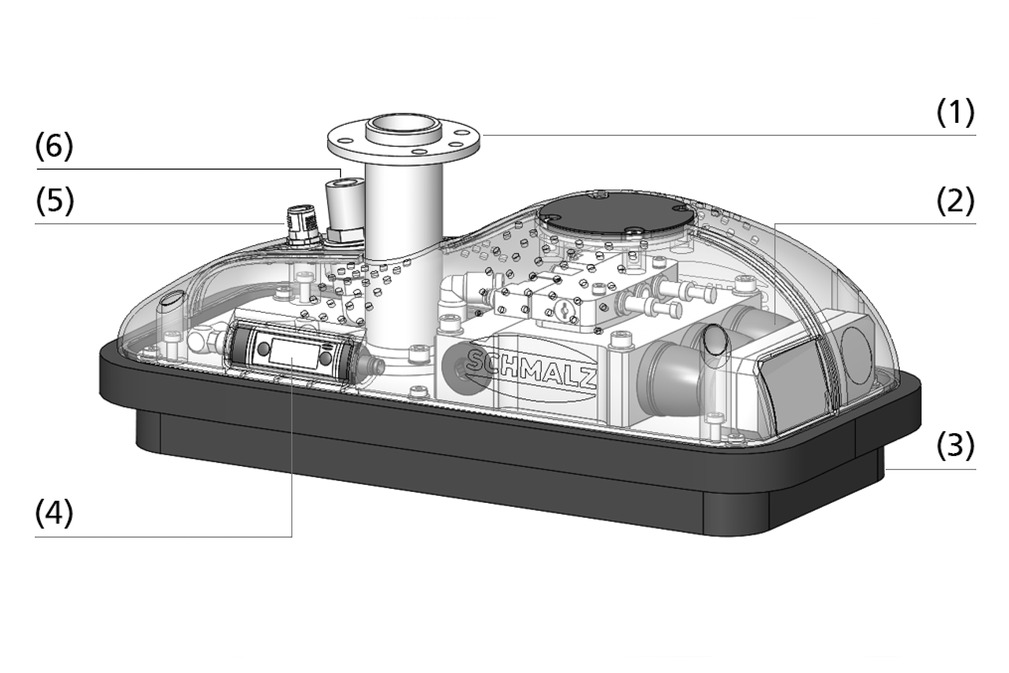
El set incluye todos los componentes para construir una garra lista para conectar
La interfaz NFC permite acceder rápidamente a los datos del dispositivo a través del smartphone
Gran capacidad de carga efectiva a pesar de su geometría ligera y dinámica gracias a la fabricación aditiva en impresión 3D
La comunicación a través de IO-Link permite una fácil integración y supervisión de la garra en entornos digitales
La documentación correspondiente a este producto está disponible en esta sección.
| Documentos | Idioma |
|---|---|
| Español |
La documentación también está disponible completamente en inglés.
| Documentos | Idioma |
|---|---|
| Inglés |
1 - 10 de 22 resultados

N° de artículo: 10.01.43.00183
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | YASKAWA |
| Modelo | HCP10DTP, HCP20DTP ≥2022 |
| Vacuestato para la tipo de construcción | Conmutación NPN |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00159
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | Doosan Robotics |
| Modelo | Serie M,A,H |
| Vacuestato para la tipo de construcción | Conmutación PNP |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00160
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | Doosan Robotics |
| Modelo | Serie M,A,H |
| Vacuestato para la tipo de construcción | Conmutación PNP |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00149
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | FANUC |
| Modelo | CRX |
| Vacuestato para la tipo de construcción | Conmutación NPN |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00148
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | FANUC |
| Modelo | CRX |
| Vacuestato para la tipo de construcción | Conmutación NPN |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00066
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | FANUC |
| Modelo | CR-15iA |
| Vacuestato para la tipo de construcción | Conmutación PNP |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00130
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | FANUC |
| Modelo | CR-15iA |
| Vacuestato para la tipo de construcción | Conmutación PNP |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00186
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | Kassow |
| Vacuestato para la tipo de construcción | Conmutación PNP |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00185
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | Kassow |
| Vacuestato para la tipo de construcción | Conmutación PNP |
| Válvula de mando | Abierta sin corriente |

N° de artículo: 10.01.43.00065
Sistema de vacío completo para la integración en robot de diseño ligero
| con | plano aspirante FXCB |
| para | KUKA |
| Modelo | iiwa 7,14 |
| Vacuestato para la tipo de construcción | Conmutación PNP |
| Válvula de mando | Abierta sin corriente |