
Flächengreifsysteme FXCB
Dichtelement: Dichtschaum oder Sauggreifer


Flächengreifer geeignet für MRK-Betrieb, da er die Vorgabe ISO TS 15066 erfüllt
Per NFC-Schnittstelle direkter, einfacher Zugriff auf Gerätedaten mittels Smartphone
Hohe effektive Traglast trotz leichter, dynamischer Geometrie dank additiver Fertigung im 3D-Druck
Innovative Kommunikationstechnik ermöglicht einfache Einbindung des Greifers in Industrie 4.0-Umgebung
Aufbau
Aufbau
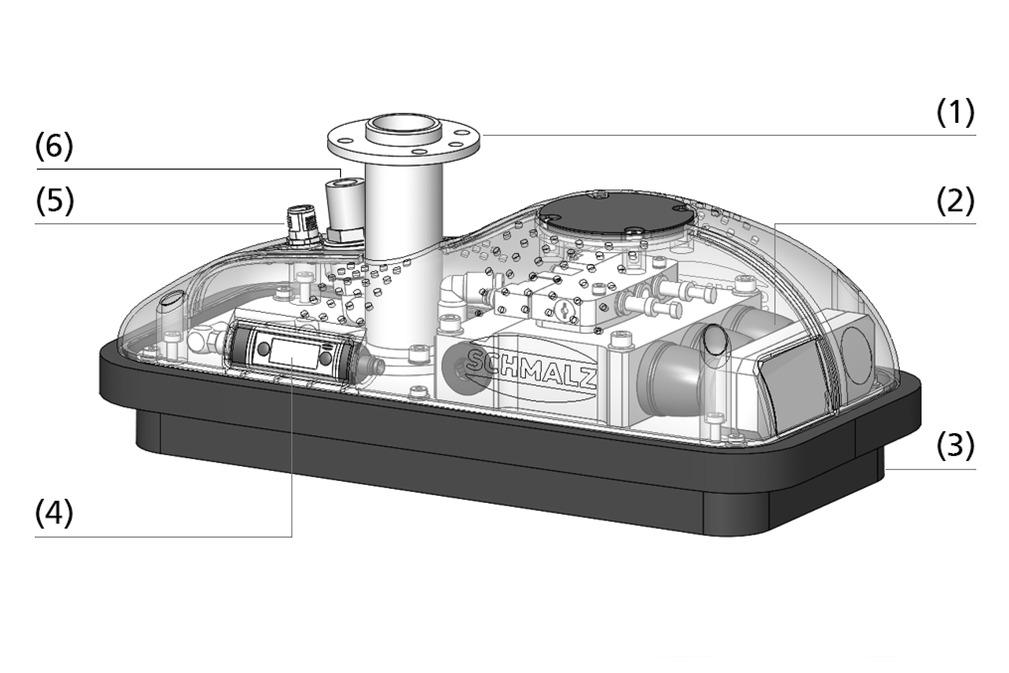
- Modularer Greifer mit 3D-gedrucktem Gehäuse
- Flanschanbindung (1) passend für gängige MRK-Roboter
- Integrierte Vakuum-Erzeugung (2) durch energiesparende Ejektormodule SEP
- Flexibler Dichtschaum mit Klebefolie oder Sauggreifer (3)
- Vakuum-Schalter VSi (4) zur Systemüberwachung
- Druckluftanschluss (6) und elektrischer Anschluss M12-8 (5)
Technische Daten
Technische Daten
- Flächengreifer mit integriertem Vakuum-Erzeuger
- Geeignet für den Betrieb mit kollaborativen Robotern
- Dichtelement: Dichtschaum oder Sauggreifer
Branchen
Branchen
- •Logistik
- •Verpackung
Dokumentation
Dokumentation
In diesem Bereich finden Sie die passende Dokumentation zu diesem Produkt.
| Dokumente | Sprache |
|---|---|
| Deutsch |
Die Dokumentation steht Ihnen auch vollumfänglich in Englisch zur Verfügung.
| Dokumente | Sprache |
|---|---|
| Englisch |