


Find out more now
Schmalz individually designs vacuum suction spiders for your application needs. The vacuum suction spiders have been designed according to a modular principle. All versions of the vacuum suction spider are derived from the basic design which can be flexibly optimized for complex handling tasks. Our experienced system consultants also use individual vacuum components from our broad range of products.
Modular system with standardized individual components optimally matched to customer requirements
Combination of different gripping principles (vacuum, mechanics, magnet etc.) possible
Low dead weight due to basic components made of aluminum, steel tube and plastic enables fast cycles
Increase in process reliability through integrated system monitoring and sensor technology
Intelligent valve modules for unoccupied suction cups
Your Individual Configuration
The suction spiders are specially adapted to your applications. Contact us and receive a custom made offer.
.jpg)
The figure shows the basic design of the suction spider SSP. On request, individual configurations with many extensions are possible.
(1) Vacuum valve Pneumatic interface
(2) Terminal box Electronic interface
(3) Flange connection Mechanical interface for common robots and gantries
(4) Mounting sections Used as load beam and vacuum distributor
(5) Flexible suspension Spring-mounted connection suitable for workpieces with height differences
(6) Gripping system (FMP/FXP) with suction cups For handling uneven and non-rigid workpieces
(7) Gripping system (FMHD) with foam For handling heavy and rough workpieces
(8) Grippers with different gripping principles For handling a wide range of workpieces (e.g. magnetic grippers for handling perforated plates or needle grippers for CFRP materials)
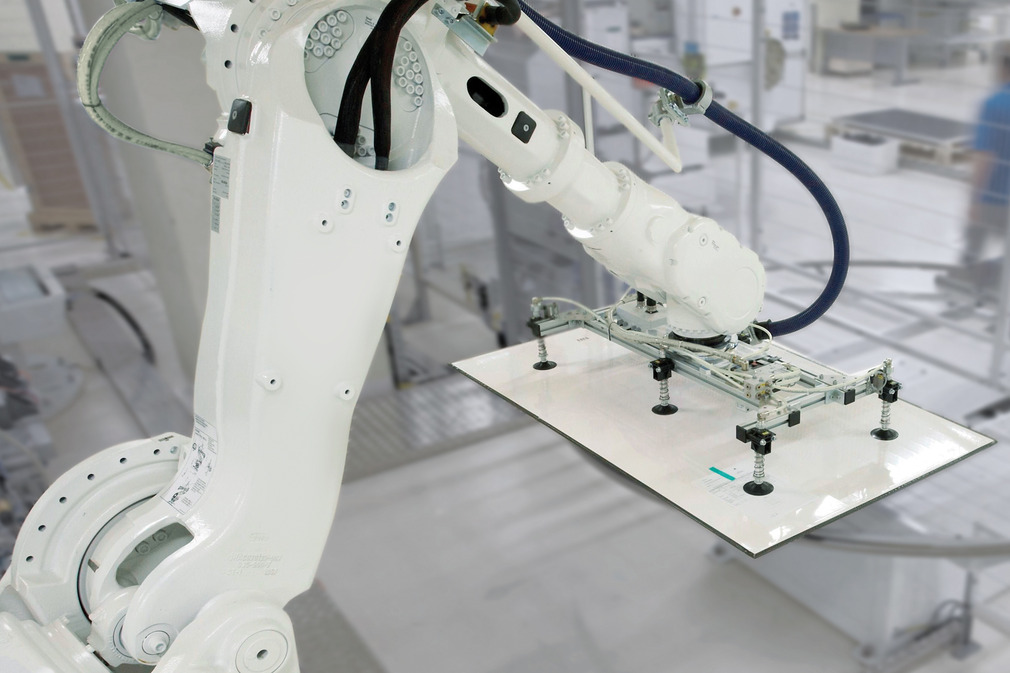
Vacuum suction spider SSP being used to handle module glass
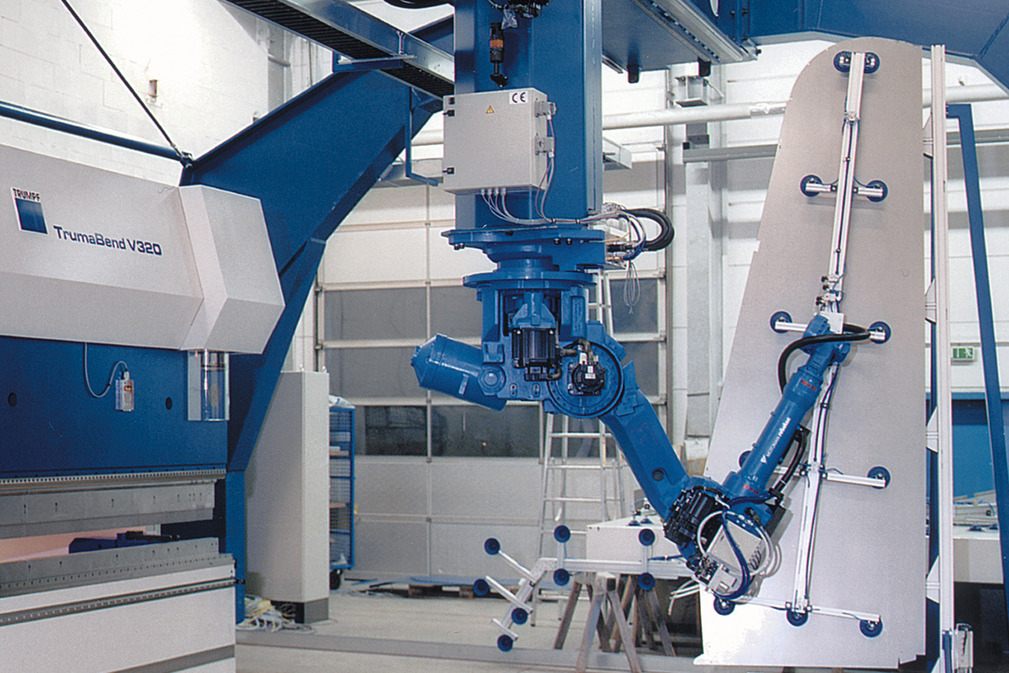
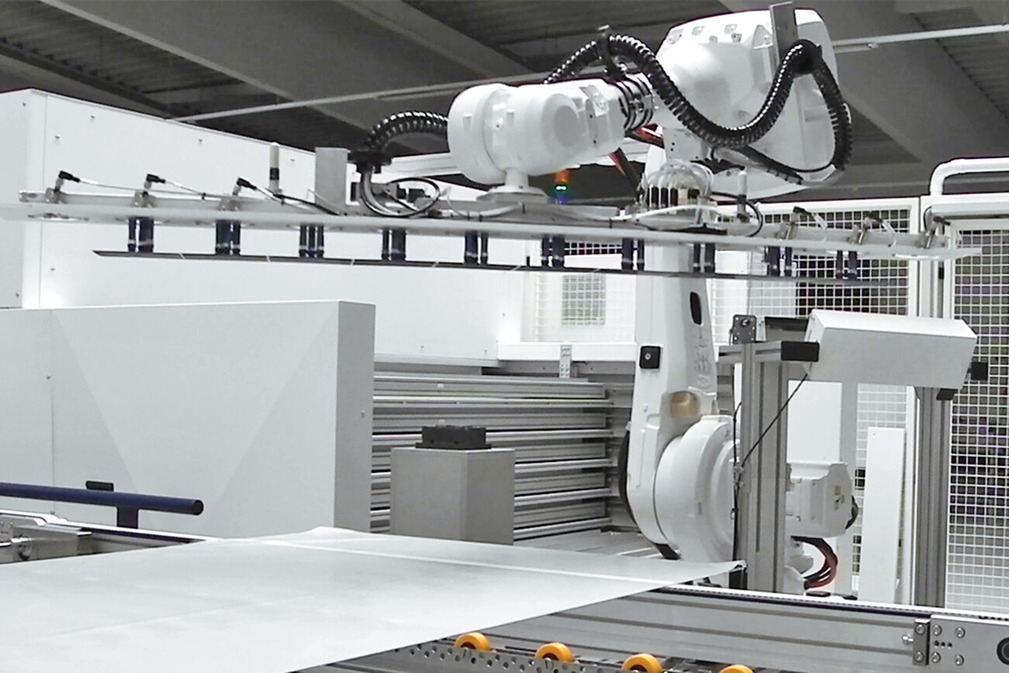
Vacuum suction spider SSP being used to handle cut metal sheets

Vacuum suction spider SSP handling cardboard boxes of different sizes

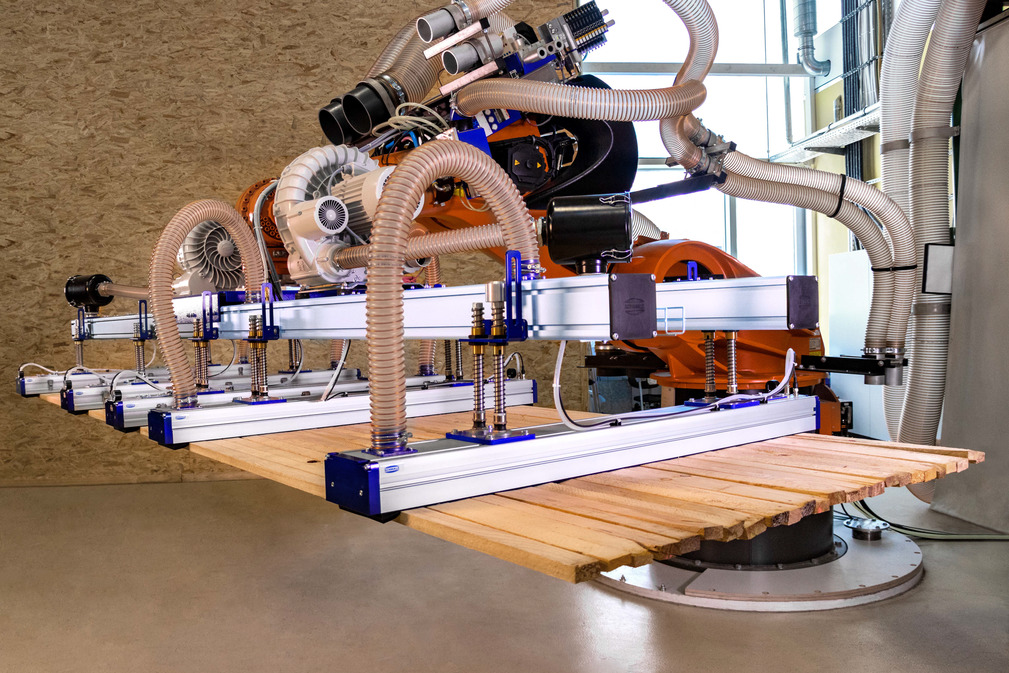
Vacuum suction spider SSP for handling layered stacking of wooden boards
.jpg)
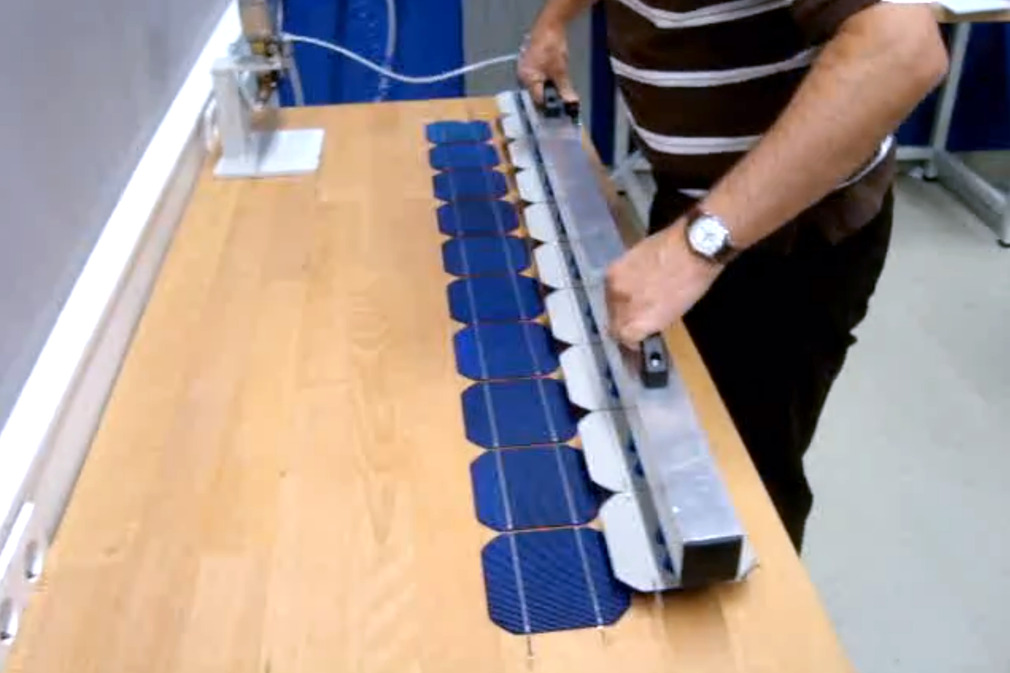
String gripper SSG handling PV strings
Discover application examples of the product in various industries - user-friendly, informative and practical.
No suitable videos found? Then take a look at our media center.