
Jetzt mehr erfahren
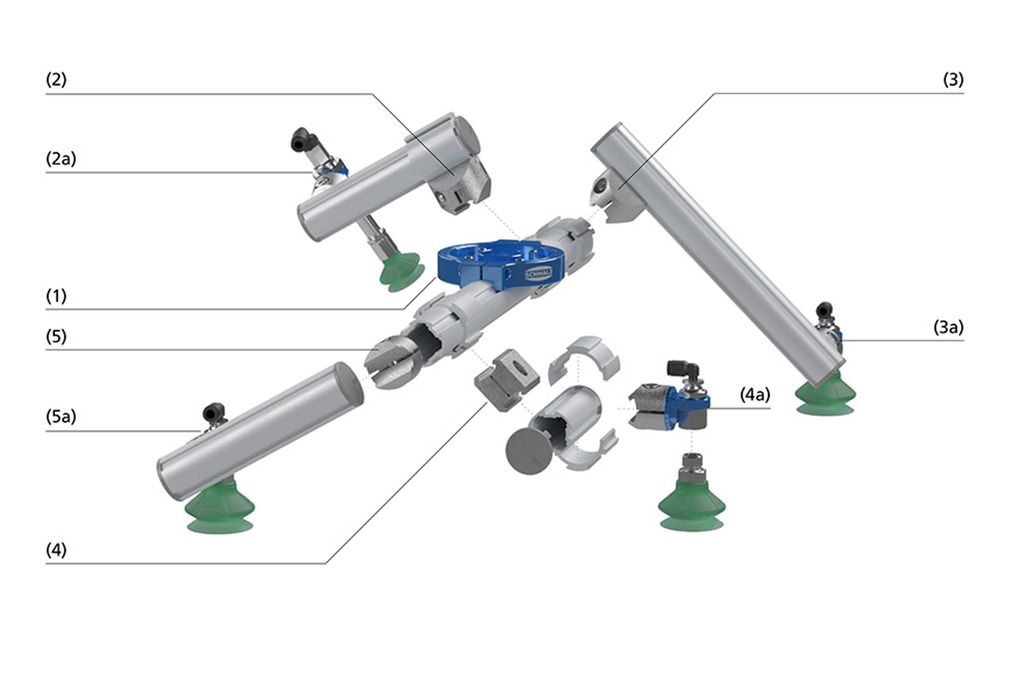
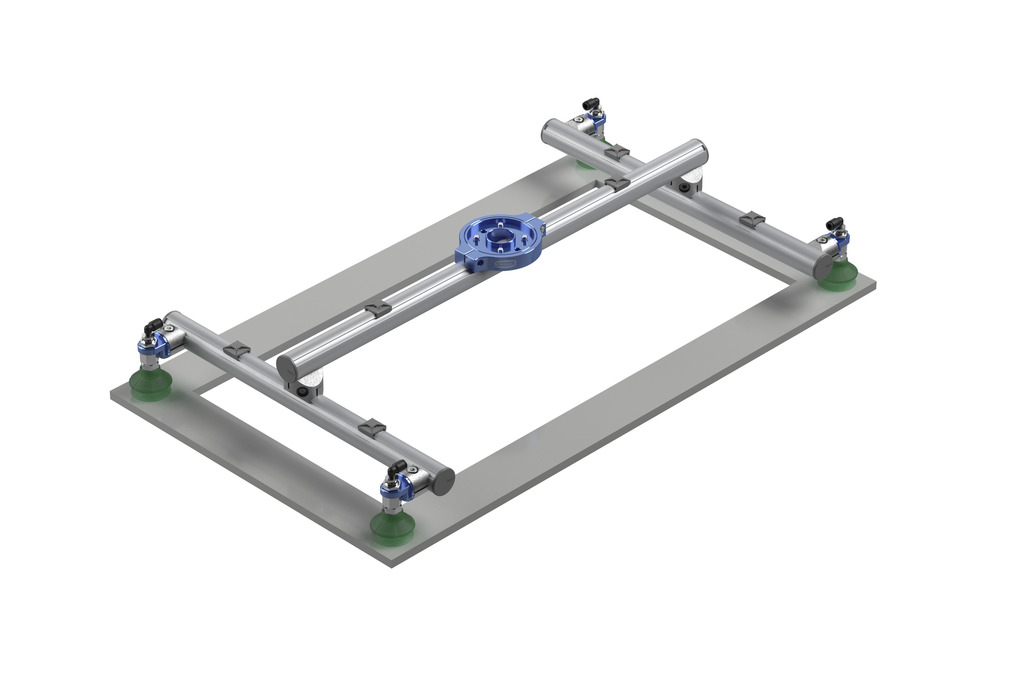
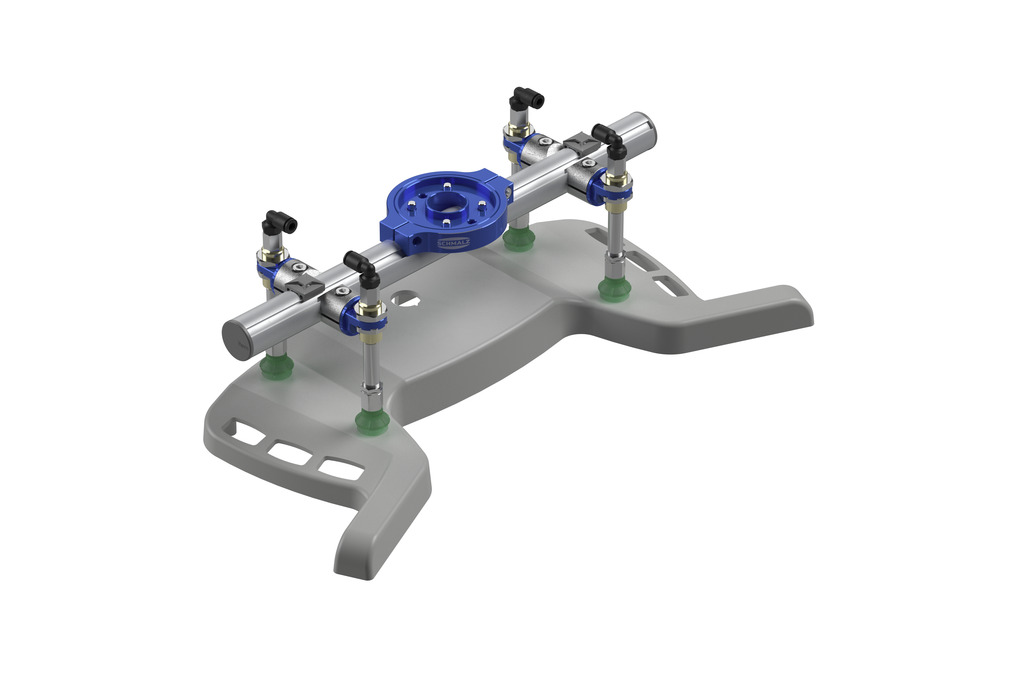
Der modulare Greiferbaukasten PXT optimiert den Aufbau flexibler Greifsysteme für die Leichtbaurobotik. Mit nur wenigen standardisierten Komponenten lassen sich Lösungen für verschiedenste Handhabungsprozesse realisieren. Die innenliegende Vakuum-Führung gewährleistet dabei höchste Einsatzflexibilität und Praktikabilität. Die Montage und Umrüstung gehen einfach, schnell und mit wenigen Werkzeugen vonstatten.
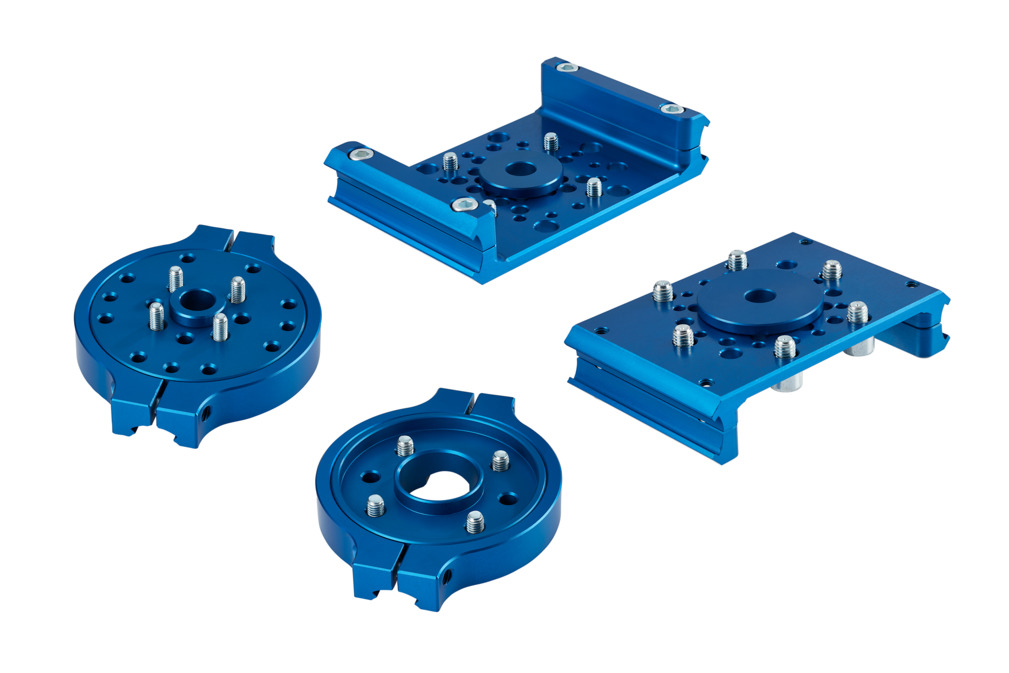
Modulares System mit passenden Anbindungselementen für alle Schmalz Komponenten und vorkonfigurierten Roboterflanschen
Wenige Standardkomponenten bieten eine große Einsatzvielfalt und erfordern nur wenige Werkzeuge
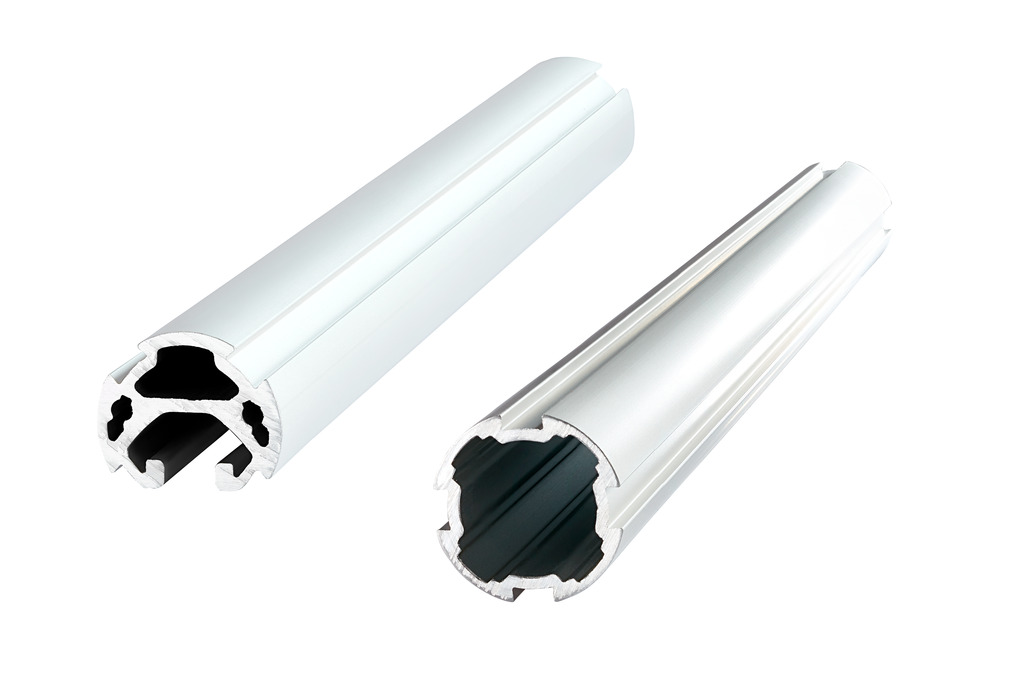
Geringes Eigengewicht und geringe Störkontur durch integrierbare Vakuum-Führung
Schnelle Anpassung an wechselnde Anforderungen und Mehrfachverwendung dank hochwertiger Komponenten
.jpg)
IMG 1:
IMG 2:
Produktschlüssel
Der Produktschlüssel dient ähnlich einer Artikelnummer der eindeutigen Identifikation von Produktkonfigurationen bei Schmalz. Der Produktschlüssel ist auf dem Produktlabel oder dem Angebot bzw. Auftrag zu finden. Sie haben Fragen zu Ihrem Produkt oder möchten eine Konfiguration nochmal bestellen? Dann halten Sie am besten bereits bei der Kontaktaufnahme mit Schmalz diesen Schlüssel bereit.
| Code | Typ |
|---|---|
| PXT | PXT |
| Code | Typ |
|---|---|
| E 10 - 26 |
Externe Vakuum-Führung 10 = 1 Haupttraverse, 0 Quertraversen 26 = 2 Haupttraversen, 6 Quertraversen |
| I 10 - 26 |
Interne Vakuum-Führung 10 = 1 Haupttraverse, 0 Quertraversen 26 = 2 Haupttraversen, 6 Quertraversen |
| Code | Typ |
|---|---|
| Zahl | Länge Haupttraverse |
| Code | Typ |
|---|---|
| S | Sauggreifer |
| HS | Halter für Sauger |
| HP | Halter für Federstößel |
| P | Federstößel |
| PS | Federstößel + Sauggreifer |
| Code | Typ |
|---|---|
| 1...24 | 1 bis 24 Greifstellen |
| Code | Typ |
|---|---|
| ABC00001C | Individueller Konfigurationscode |
Bestellhinweise
Wir bieten Ihnen drei Bestelloptionen an:
In diesem Bereich finden Sie die passende Dokumentation zu diesem Produkt.
| Dokumente | Sprache |
|---|---|
| Deutsch | |
| Deutsch |
Die Dokumentation steht Ihnen auch vollumfänglich in Englisch zur Verfügung.
| Dokumente | Sprache |
|---|---|
| Englisch | |
| Englisch |
Anwendung im Werkstück-Handling von Halbfertigteilen oder bei Logistikaufgaben

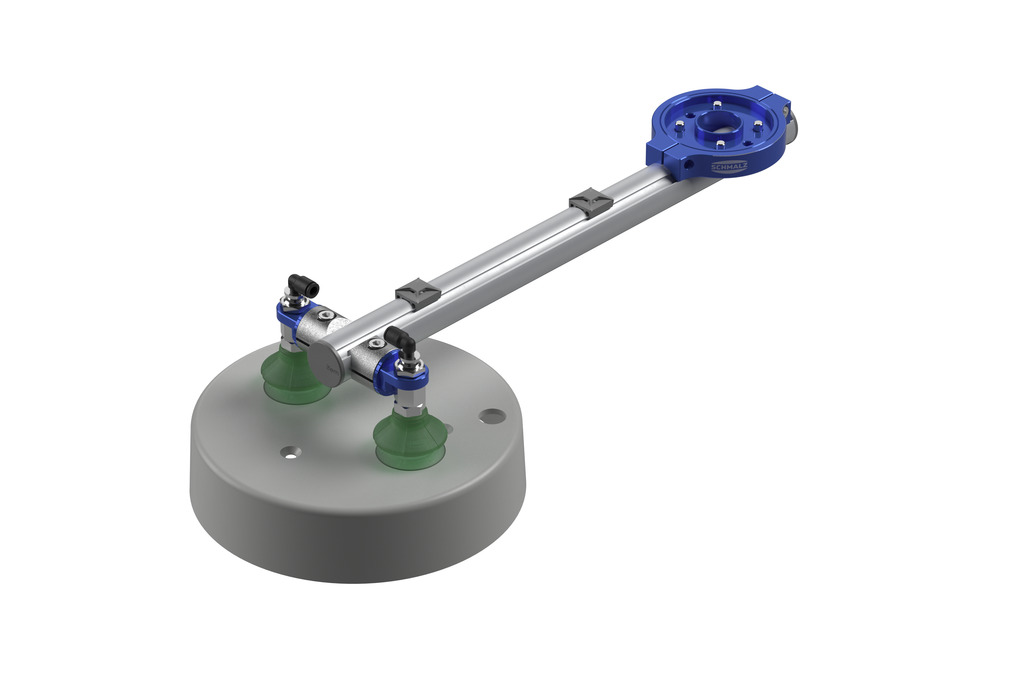
Handhabung von Profilen, Rohren und Traversen
Einsatz in Montageprozessen
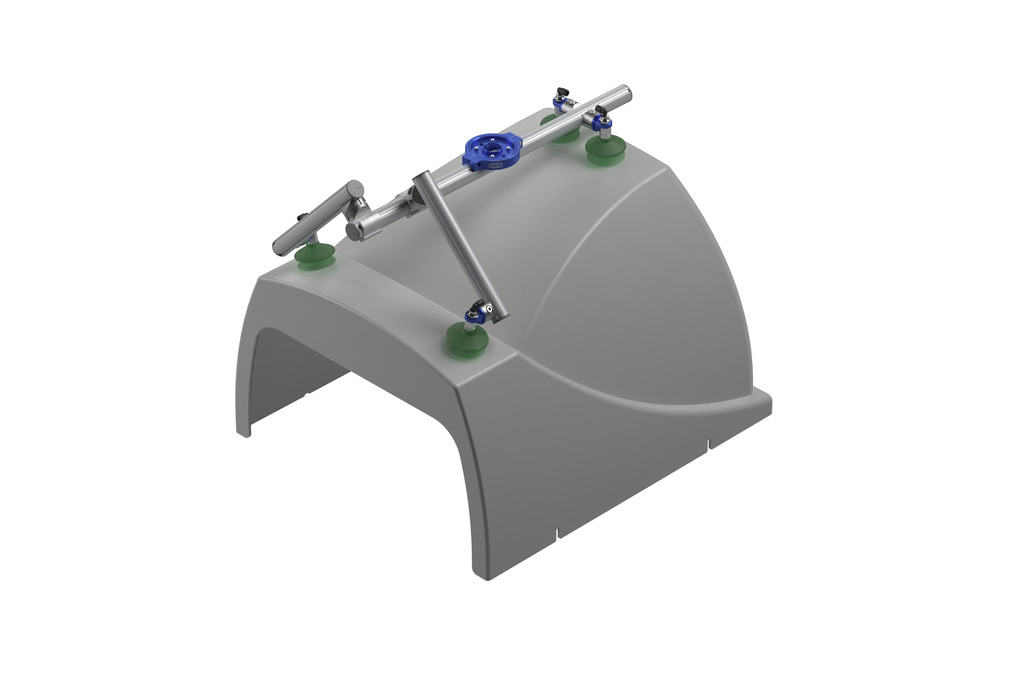
Handling von Freiformteilen durch Möglichkeit zum dreidimensionalen Aufbau des Greifers
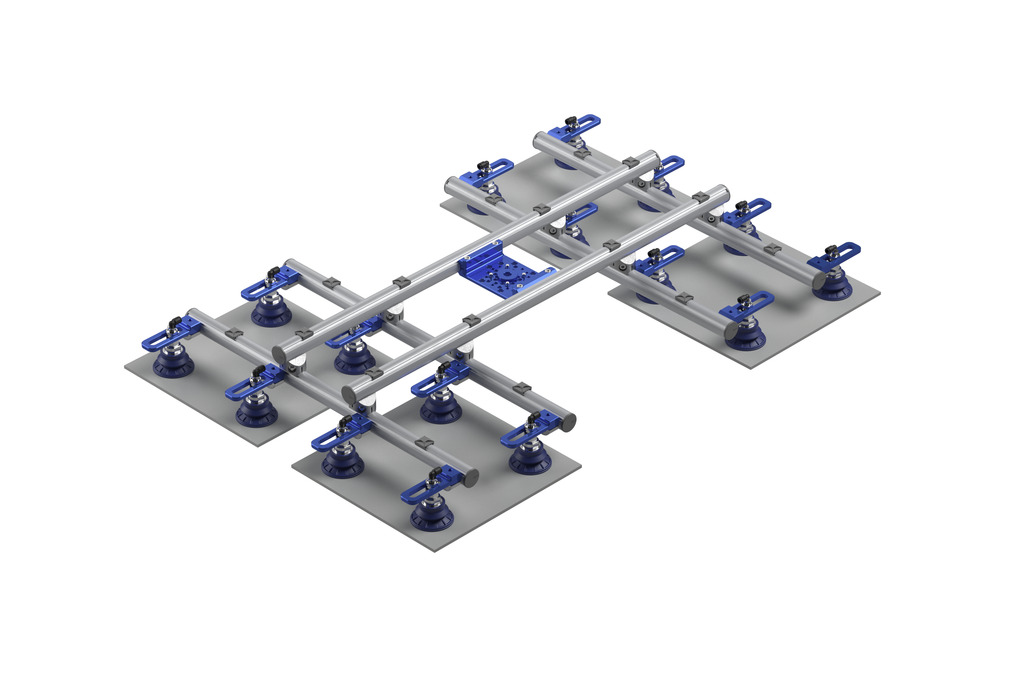
Zeitgleiches Handhaben mehrerer Werkstücke zum Beispiel bei Materialzuschnitten
Einsatz bei der Maschinenbeladung und -entladung