Ventosas de vacío
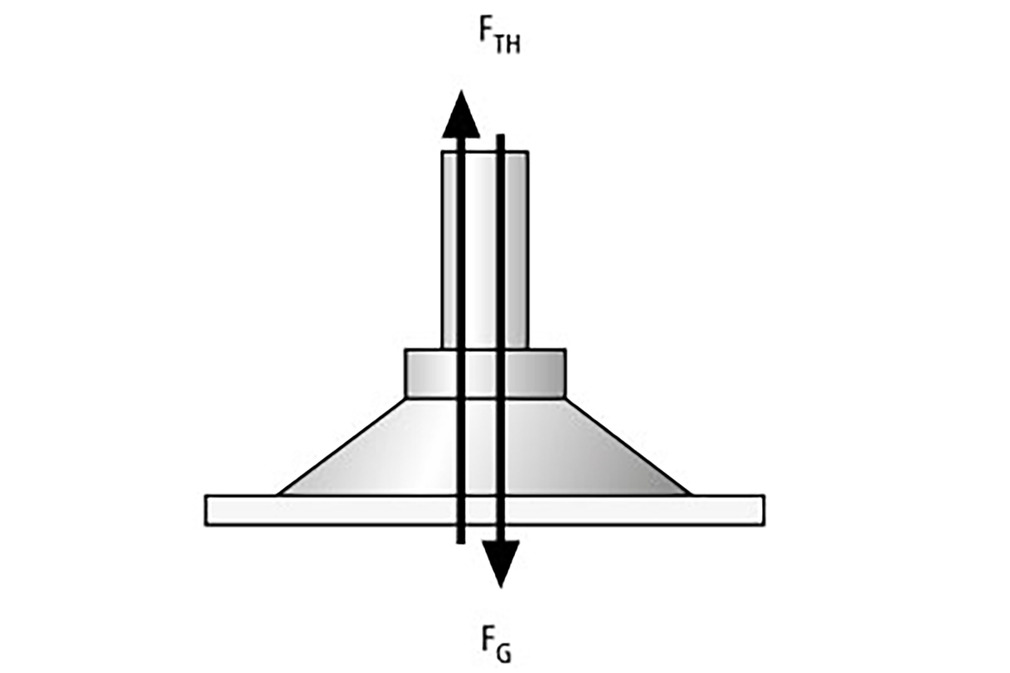
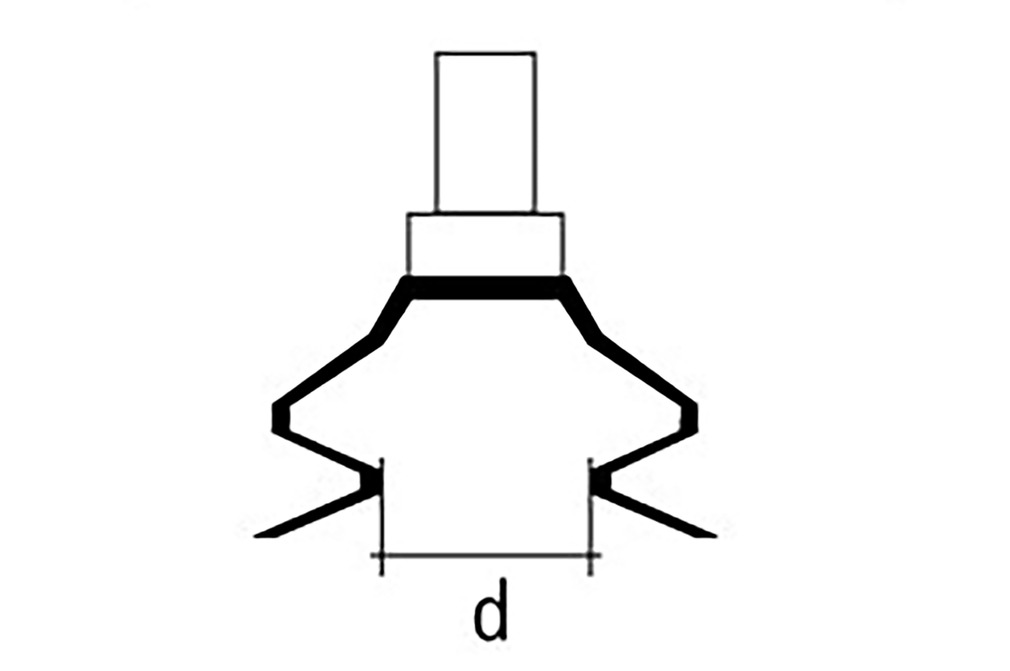
- Nuestro programa de productos incluye gran variedad de ventosas con diferentes diseños, tamaños y materiales, ofreciéndole la ventosa más adecuada para cada aplicación. Las ventosas se componen de ventosa y boquilla de conexión.
Mostrar categoría