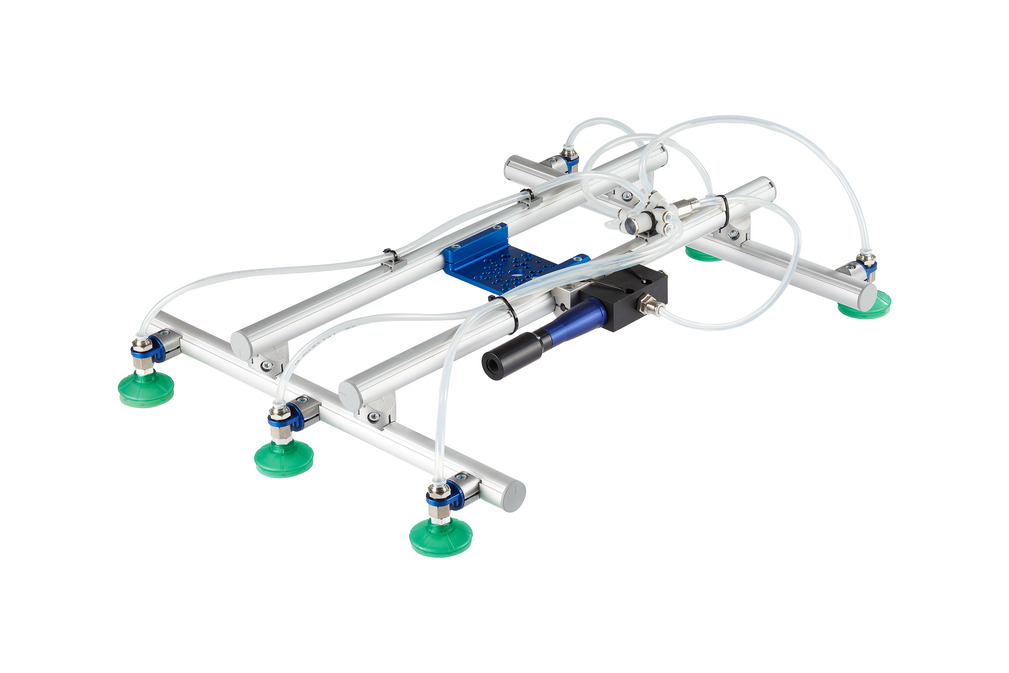
Zestawy do obsługi
- Wstępnie zmontowane zestawy manipulacyjne
- Dla różnych lekkich robotów
Rozwiązania z zakresu robotyki firmy Schmalz są wykorzystywane w maszynach załadowczych i rozładowczych, przy kompletacji zamówień, paletyzacji i depaletyzacji lub w procesach kompletacji pojemników. Program obejmuje standardowe i konfigurowalne chwytaki końcowe, zestawy chwytaków, zestawy wizyjne i manipulacyjne oraz elektryczne i pneumatyczne generatory podciśnienia.
Nasze rozwiązania chwytaków są kompatybilne ze wszystkimi popularnymi lekkimi robotami i cobotami i są dostarczane jako gotowe do podłączenia zestawy. Wyposażony w interfejsy komunikacyjne do dwukierunkowej wymiany danych, w funkcje diagnostyczne procesu obsługi, w systemy wizyjne do wykrywania punktów chwytaka lub ekosystemy do automatycznej zmiany chwytaka, chwytak zajmuje centralne koło w całym systemie.
Rozwiązania z zakresu robotyki firmy Schmalz charakteryzują się maksymalną precyzją, bezpieczeństwem i kontrolą procesu chwytania.