
Kappaleiden poiminta
Kappaleiden poiminta tarkoittaa valmistuksen ja logistiikan automatisoitua prosessia, jossa robotit ottavat osia säiliöstä (ns. "bin").
Tätä tekniikkaa käytetään pääasiassa teollisuudessa tuotannon hyötysuhteen lisäämiseksi korvaamalla yksittäisten komponenttien manuaalinen irrottaminen, mikä säästää aikaa ja kustannuksia.
Automatisoitua prosessia käytetään myös poiminta ja pakkaamisen prosessissa, joka on välttämätön tuotteiden nopean ja tarkan valinnan ja pakkaamisen kannalta. Käyttämällä nykyaikaista robotiikkaa yhdessä robottinäön kanssa nämä järjestelmät tölkki jopa vaikeasti tarttuvat osat, mikä lisää merkittävästi joustavuutta erilaisten työkappaleiden käsittelyssä.
Kappaleiden poiminta-järjestelmien toimintatapa
Kappaleiden poiminta-alueella robotti käyttää kuvan prosessointia, antureita, tekoälyä ja tarttujaa tunnistamaan ja tarttumaan esineisiin roskakorissa.

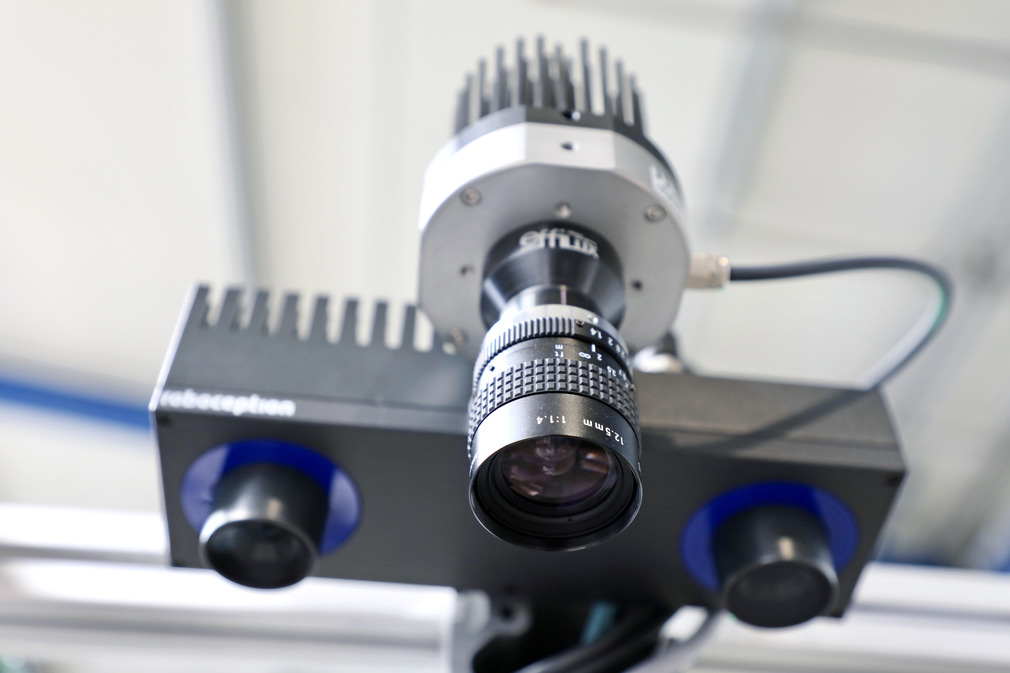
Osien havaitseminen ja paikantaminen
Kappaleiden poiminta -järjestelmän ensimmäinen vaihe alkaa roskakorissa olevien esineiden tarkalla tunnistamisella. Tämä tehdään käyttämällä kehittyneitä näköjärjestelmiä ja 3D-kameroita, jotka mahdollistavat roskiksen yksityiskohtaisen analysoinnin. Nämä tekniikat skannaavat säiliössä olevat työkappaleet ja luovat 3D-pistepilven, joka toimii jatkokäsittelyn prosessina.
Järjestelmä laskee luotujen mallitietojen avulla optimaalisen otteen roskiksessa, jotta robotti voi poistaa halutun osan tarkasti ilman, että muut esineet liikkuvat tai vahingoittuvat tahattomasti.
Tämän vaiheen ratkaiseva etu on tekoälyn ja koneoppimisen käyttö. Näiden tekniikoiden avulla robotti pystyy määrittämään kunkinosan tarkan sijainnin myös sekavissa järjestelyissä.
Järjestelmää jatkuvasti parantamalla robotti pystyy käsittelemään tehokkaasti myös monimutkaisia ja kaoottisia säiliöitä. Tämä ei ainoastaan vähennä varjostusta (ongelma, jossa osia ei tunnisteta niiden sijainnin tai kohdistuksen vuoksi), vaan myös varmistaa, että jokainen osa tunnistetaan tarkasti ja poimitaan oikein.

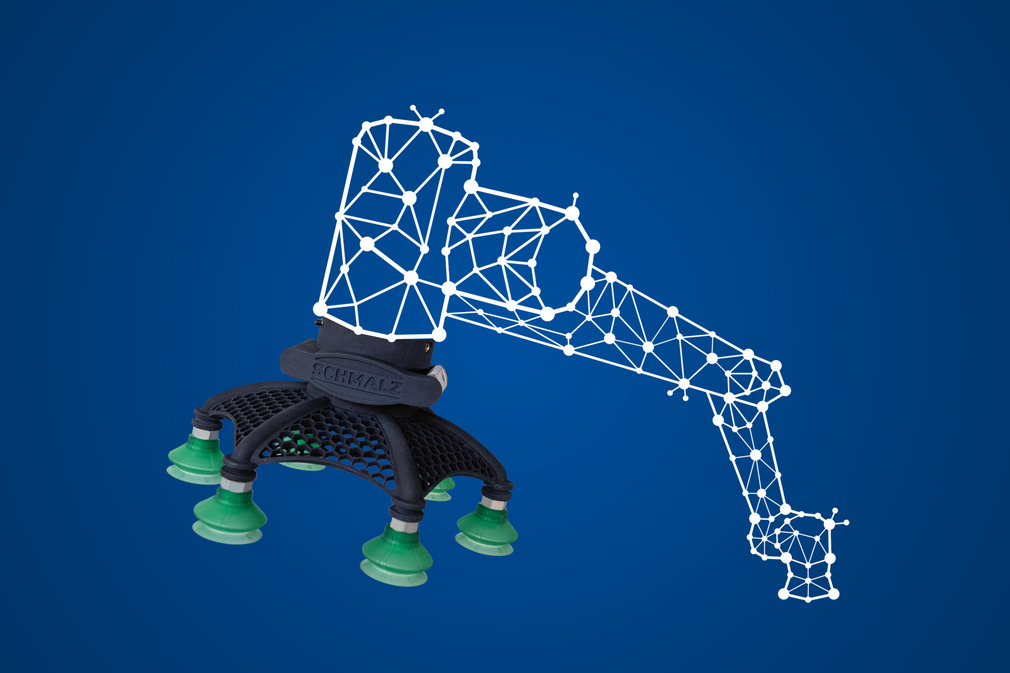
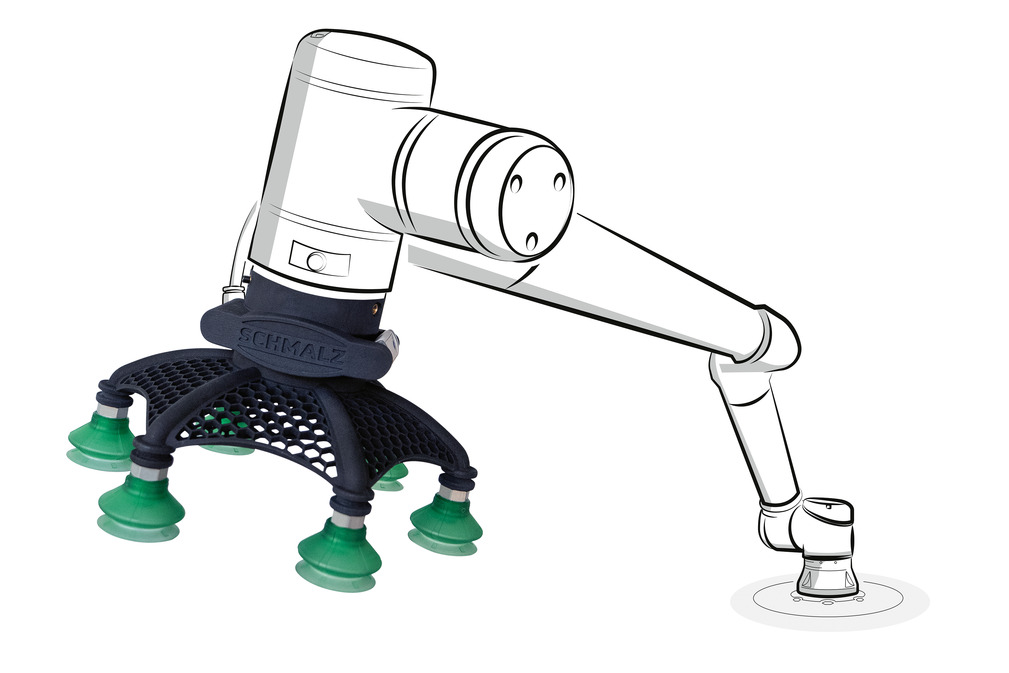
Tarttuvat osat alipainetegnologia
Kun työkappaleiden sijainti on tiedossa, alipainetegnologia tulee käyttöön. Tyhjiöimukuppeilla varustetut varren päädyn työkalut nostavat työkappaleet ulos säiliöstä. Nämä imukuppi käyttävät tyhjiötä tarttumaan kappaleisiin turvallisesti ja lujasti vahingoittamatta niitä.
Alipainetegnologian joustavuus mahdollistaa tarttumisen monenlaisiin muotoihin ja materiaaleihin, herkistä työkappaleista raskaisiin komponentteihin.

Kuljetus ja sijoittaminen
Kun työkappale on poistettu, se kuljetetaan seuraavaan prosessi- tai tuotantovaiheeseen.
Robotti voi joko sijoittaa työkappaleet tietyssä järjestyksessä tai kulloisenkin tuotantovaatimuksen mukaisesti haluttuun sijaintiin tai tallettaa ne kohdesäiliöön. Näin varmistetaan sujuva ja tehokas integrointi kokonaistuotantoprosessiin.
Optimointi tekoälyn ja koneoppimisen avulla
Nykyaikaiset kappaleiden poiminta-järjestelmät on varustettu algoritmeilla, jotka mahdollistavat järjestelmän jatkuvan parantamisen.
Koneoppimisen ansiosta robotti oppii aiemmista kokemuksista ja optimoi poimintastrategiansa, mikä lisää hyötysuhdetta, pienentää virheprosenttia ja nopeuttaa sovittamista uusiin työkappaleisiin tai vaihteleviin olosuhteisiin.
Kappaleiden poiminta-järjestelmien edut
Alipainetegnologiaa ja kuvankäsittelyä hyödyntävät kappaleiden poiminta-järjestelmät pystyvät tarttumaan työkappaleisiin ja sijoittamaan ne tarkasti. Nämä järjestelmät tölkki erilaisia esineitä niiden monimutkaisuudesta tai geometriasta riippumatta.
Automaattinen irrotusprosessi ei ainoastaan vähennä inhimillisiä virheitä, vaan myös lisää tuotannonopeutta, mikä johtaa merkittävään hyötysuhteen kasvuun.
Tämän tekniikan etuna on myös se, että se vähentää työntekijöiden rasitusta, kun toistuvat, fyysisesti rasittavat toiminnot, kuten esineiden manuaalinen tarttuminen, jäävät pois.
Tämä edistää ergonomiaa työpaikalla vähentämällä työntekijöiden fyysistä rasitusta ja tekemällä työympäristöstä samalla turvallisemman.

Sovellukset
Kappaleiden poiminta on sovelluksissaan monilla teollisuudenaloilla, kuten auto-teollisuudessa, elektroniikkateollisuudessa, elintarviketeollisuudessa ja logistiikassa.
Esimerkiksi auto-teollisuudessa kappaleiden poimintaa käytetään työkappaleiden, kuten ruuvien, tiivisteiden ja muiden komponenttien automaattiseen irrottamiseen ja jatkoprocessiin.
Elintarviketeollisuudessa tekniikka auttaa käsittelemään tarkasti irtopakkauksia tai tuotteita, kuten hedelmiä ja vihanneksia.
Aiheeseen liittyvät termit
Lisätietoja
EOAT: robotisaation ja automaation varren päädyn työkalut
Ympärivuotinen tehokas pito: Schmalzin EOAT-ratkaisut monipuoliseen, prosessiluotettavaan käsittelyyn automaatiossa.
FAQ - Robotiikka - Cobotit ja kevyet robotit
Löydät vastauksia kysymyksiin, jotka koskevat automatisoituja prosesseja coboteilla ja alipainetarrain sekä alipainetarrain ja -generaattorin valintaa.