빈 피킹
빈 피킹은 제조 및 물류 분야에서 로봇이 컨테이너(소위 '빈')에서 부품을 제거하는 자동화 공정을 말합니다.
이 기술은 주로 산업 분야에서 단일 부품의 수동 제거를 대체하여 생산 효율성을 높이고 시간과 비용을 절감하기 위해 사용됩니다.
이 자동화 공정은 제품을 빠르고 정확하게 선별하고 패키징하는 데 필수적인 픽 앤 팩 공정에도 사용됩니다. 이러한 시스템은 로봇 비전과 함께 최신 로봇 공학을 사용하여 잡기 어려운 부품도 인식할 수 있어 다양한 작업물을 핸들링할 때 유연성이 크게 향상됩니다.
빈 피킹 시스템의 작동 모드
빈 피킹에서는 로봇이 이미지 처리, 센서, 인공 지능, 그리퍼를 조합하여 빈 안에 있는 물체를 식별하고 잡습니다.

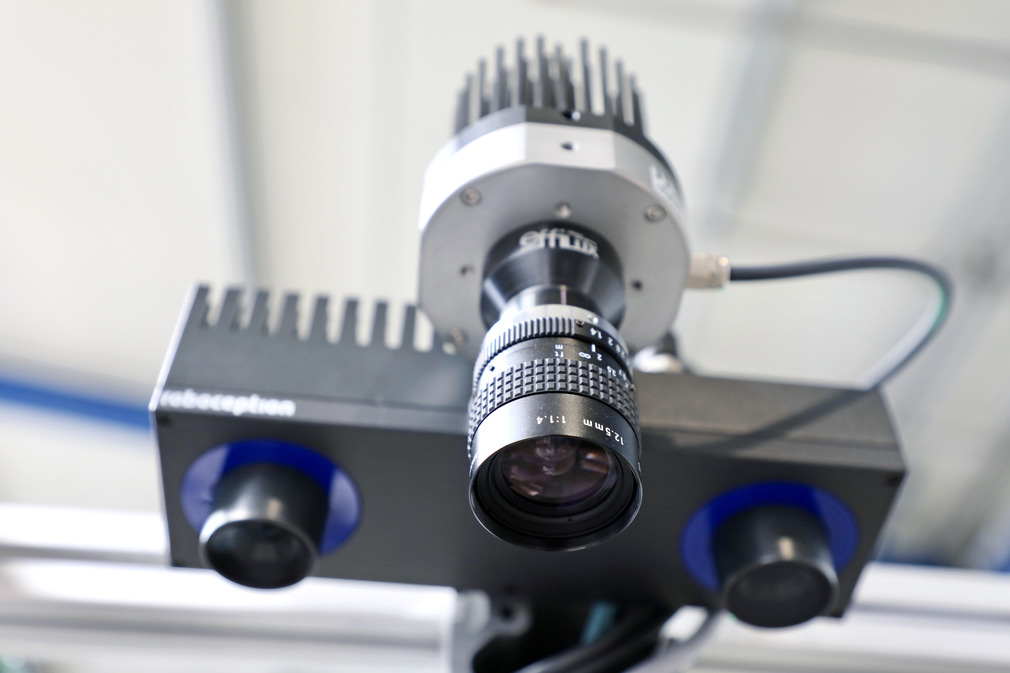
부품 감지 및 현지화
빈 피킹 시스템의 첫 번째 단계는 빈 안에 있는 물체를 정밀하게 감지하는 것으로 시작됩니다. 이 작업은 정교한 비전 시스템과 3D 카메라를 사용하여 빈을 자세히 분석합니다. 이러한 기술은 빈에 있는 작업물을 스캔하여 추가 공정의 기초가 되는 3D 도트 클라우드를 생성합니다.
생성된 모델 정보를 사용하여 시스템은 빈에서 최적의 그립을 계산하여 로봇이 의도치 않게 다른 물체를 움직이거나 손상시키지 않고 원하는 부품을 정확하게 제거할 수 있도록 합니다.
이 단계의 결정적인 장점은 인공지능(AI)과 머신러닝을 사용한다는 점입니다. 이러한 기술을 통해 로봇은 복잡한 배열에서도 각 부품의 정확한 위치를 파악할 수 있습니다.
지속적인 시스템 개선을 통해 로봇은 복잡하고 혼란스러운 컨테이너도 효율적으로 처리할 수 있습니다. 이를 통해 섀도잉(부품의 위치나 정렬로 인해 부품이 감지되지 않는 문제)을 줄일 뿐만 아니라 각 부품을 정확하게 식별하고 정확하게 피킹할 수 있도록 보장합니다.

진공 기술로 부품 그리핑하기
작업물의 위치를 파악하자마자 진공 기술이 작동합니다. 진공 흡입 컵이 장착된 엔드오브암 툴링(EOAT)이 작업물을 빈에서 들어 올립니다. 이 진공패드는 진공을 사용하여 물체를 손상시키지 않고 안전하고 단단하게 잡습니다.
진공 기술의 유연성 덕분에 섬세한 작업물부터 무거운 부품까지 다양한 모양과 재질을 잡을 수 있습니다.

운반 가능 및 배치
작업물이 제거되면 다음 공정 또는 생산 단계로 운반 가능합니다.
로봇은 특정 순서대로 또는 각 생산 요구 사항에 따라 작업물을 원하는 위치에 배치하거나 대상 컨테이너에 넣을 수 있습니다. 이를 통해 전체 생산 공정에 원활하고 효율적인 통합을 보장합니다.
AI 및 머신러닝을 통한 최적화
최신 빈 피킹 시스템은 시스템을 지속적으로 개선할 수 있는 알고리즘으로 회로화되어 있습니다.
머신 러닝을 통해 로봇은 이전 경험을 학습하고 피킹 전략을 최적화하여 효율성은 높이고 오류율은 낮추며 새로운 작업물이나 다양한 조건에 더 빠르게 적용할 수 있습니다.
빈 피킹 시스템의 장점
진공 기술과 이미지 처리를 사용하여 빈 피킹 시스템은 작업물을 정밀하게 잡고 배치할 수 있습니다. 이러한 시스템은 복잡성이나 형상에 관계없이 다양한 물체를 핸들링할 수 있습니다.
자동화된 반출 공정은 인적 오류를 줄일 뿐만 아니라 생산 속도를 높여 효율성이 크게 향상됩니다.
이 기술의 또 다른 장점은 물체를 수동으로 잡는 등 반복적이고 육체적으로 힘든 작업을 대신할 수 있어 직원의 부담을 덜어준다는 점입니다.
이는 직원의 신체적 스트레스를 줄이고 동시에 작업 환경을 더 안전하게 만들어 작업장의 인체공학적인 측면을 촉진합니다.

애플리케이션
빈 피킹은 자동차 산업, 전자제품 제조, 식품 산업, 물류 등 다양한 산업 분야에서 애플리케이션이 사용되고 있습니다.
예를 들어 자동차 산업에서는 빈 피킹을 사용하여 나사, 실링 및 기타 부품과 같은 작업물을 자동으로 제거하고 추가 공정을 거칩니다.
식품 산업에서는 느슨한 패키징이나 과일 및 채소와 같은 제품을 정밀하게 핸들링하는 데 도움이 되는 기술입니다.