
Kompletacja pojemników
Kompletacja pojemników odnosi się do zautomatyzowanego procesu w produkcji i logistyce, w którym roboty wyjmują części z pojemnika (tzw. "bin").
Technologia ta jest wykorzystywana głównie w przemyśle w celu zwiększenia efektywności produkcji poprzez zastąpienie ręcznego wyjmowania pojedynczych elementów, oszczędzając w ten sposób czas i koszty.
Zautomatyzowany proces jest również wykorzystywany w pobraniu i pakowaniu, co jest niezbędne do szybkiego i precyzyjnego wyboru i pakowania produktów. Dzięki zastosowaniu nowoczesnej robotyki w połączeniu z wizją robotów, systemy te mogą nawet rozpoznawać części trudne do uchwycenia, co znacznie zwiększa elastyczność podczas obsługi różnych przedmiotów obrabiany.
Tryb obsługi systemów kompletacji pojemników
W kompletacji pojemników robot wykorzystuje kombinację przetwarzania obrazu, czujników, sztucznej inteligencji i chwytaka do identyfikacji i chwytania obiektów w pojemniku.

Wykrywanie i lokalizacja części
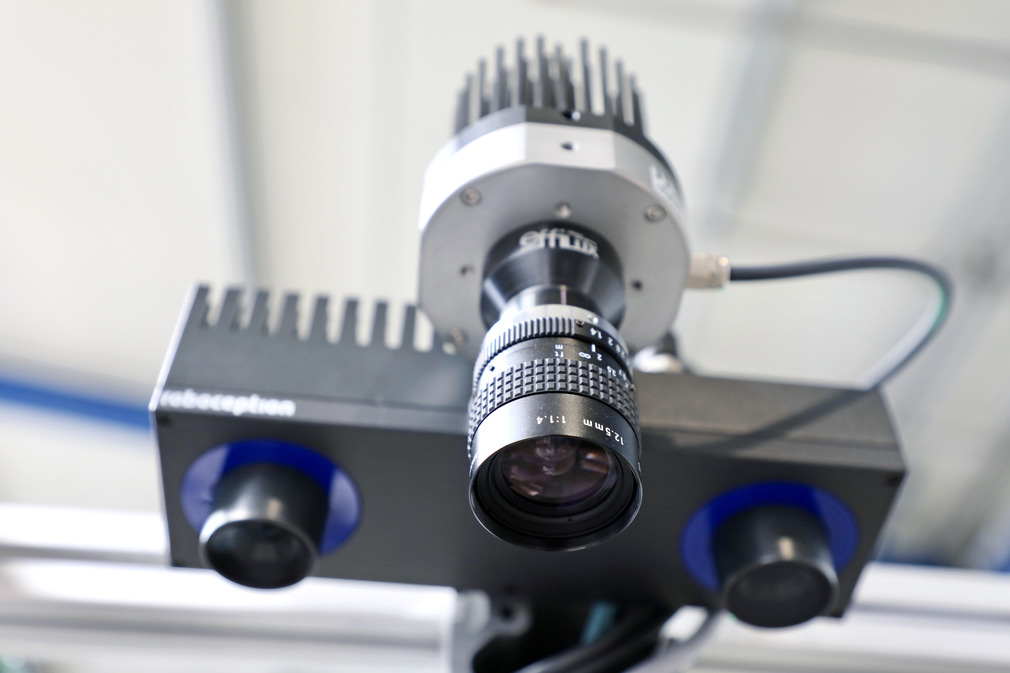
Pierwsza faza kompletacji systemów pojemników rozpoczyna się od precyzyjnego wykrywania obiektów w pojemniku. Odbywa się to za pomocą zaawansowanych systemów wizyjnych i kamer 3D, które umożliwiają szczegółową analizę pojemnika. Technologie te skanują przedmioty obrabiany w pojemniku i tworzą chmurę punktów 3D, która służy jako podstawa do dalszego procesu.
Korzystając z wygenerowanych informacji o modelu, system oblicza optymalny chwyt w pojemniku, dzięki czemu robot może precyzyjnie usunąć żądaną część bez niezamierzonego przesuwania lub uszkadzania innych obiektów.
Zdecydowaną zaletą tej fazy jest wykorzystanie sztucznej inteligencji (AI) i uczenia maszynowego. Technologie te umożliwiają robotowi określenie dokładnej pozycji każdej części, nawet w zagmatwanych układach.
Dzięki ciągłemu udoskonalaniu systemu, puszka robota może również efektywnie radzić sobie ze złożonymi i chaotycznymi pojemnikami. Pozwala to nie tylko ograniczyć cieniowanie (problem, w którym części nie są wykrywane ze względu na ich położenie lub orientację), ale także zapewnić, że każda część jest dokładnie identyfikowana i prawidłowo pobierana.

Chwytanie części za pomocą techniki podciśnieniowej
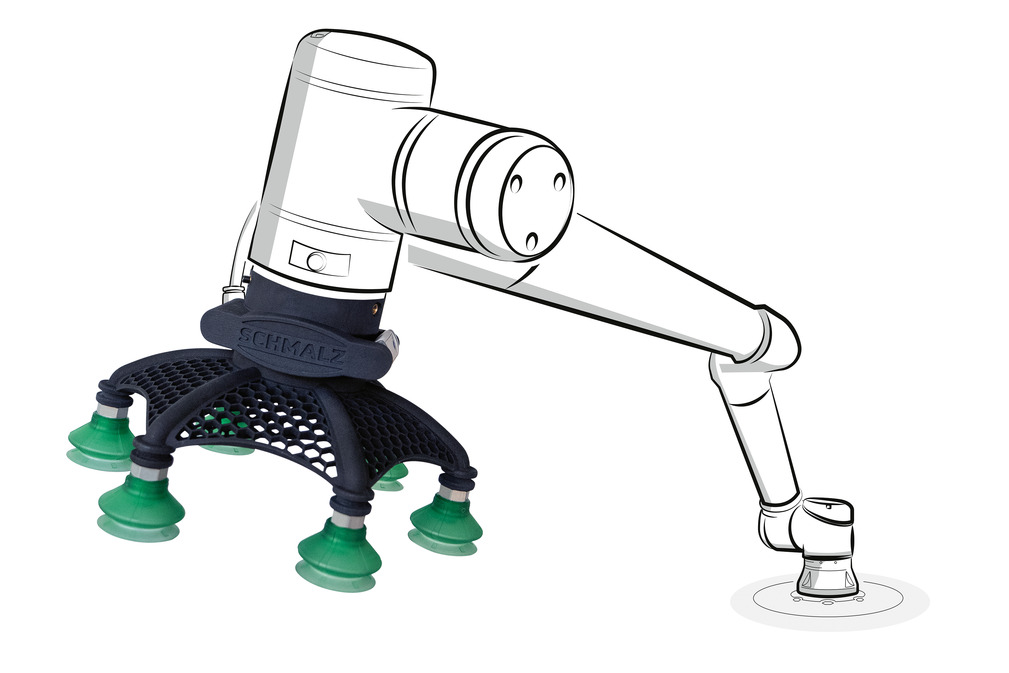
Gdy tylko pozycja przedmiotów obrabiany jest znana, do gry wkracza technika podciśnieniowa. Oprzyrządowanie końca ramienia (EOAT) z przyssawkami podciśnieniowymi podnosi przedmioty obrabiany z pojemnika. Przyssawki te wykorzystują podciśnienie do bezpiecznego i mocnego chwytania przedmiotów bez ich uszkadzania.
Elastyczność techniki podciśnieniowej umożliwia chwytanie szerokiej gamy kształtów i materiałów, od delikatnych przedmiotów obrabianych po ciężkie komponenty podciśnieniowe.

Transport i rozmieszczenie
Po usunięciu przedmiotu obrabiany jest transportowany do następnego etapu procesu lub produktu.
Robot może umieszczać przedmioty obrabiany w określonej kolejności lub zgodnie z danym wymogiem produkcyjnym w żądanej lokalizacji lub deponować je w docelowym pojemniku. Zapewnia to płynną i efektywną integrację z całym procesem produkcji.
Optymalizacja dzięki sztucznej inteligencji i uczeniu maszynowemu
Nowoczesne systemy kompletacji pojemników są wyposażone w obwody z algorytmami, które umożliwiają ciągłe doskonalenie systemu.
Uczenie maszynowe pozwala robotowi uczyć się na podstawie wcześniejszych doświadczeń i optymalizować strategie kompletacji, co skutkuje wyższą efektywnością, dolnym poziomem błędów i szybszą adaptacją do nowych przedmiotów obrabiany lub zmiennych warunków.
Zalety systemów kompletacji pojemników
Dzięki wykorzystaniu techniki podciśnieniowej i przetwarzania obrazu, podciśnieniowe systemy chwytające są w stanie precyzyjnie chwytać i umieszczać przedmioty obrabiany. Systemy te mogą obsługiwać wiele różnych obiektów, niezależnie od ich złożoności lub geometrii.
Zautomatyzowany proces wyjmowania nie tylko redukuje błędy ludzkie, ale także zwiększa szybkość produktu, prowadząc do znacznego wzrostu efektywności.
Kolejną zaletą tej technologii jest to, że odciąża ona pracowników, ponieważ powtarzalne, fizycznie uciążliwe czynności, takie jak ręczne chwytanie przedmiotów, są przejmowane.
Promuje to ergonomicznie miejsce pracy, zmniejszając stres fizyczny pracowników i jednocześnie czyniąc środowisko pracy bezpieczniejszym.

Aplikacje
Kompletacja pojemników ma aplikacje w wielu branżach, w tym w przemyśle motoryzacyjnym, produkcji elektroniki, przemyśle spożywczym i logistyce.
Na przykład w branży motoryzacyjnej kompletacja pojemników jest wykorzystywana do automatycznego wyjmowania i dalszej obróbki przedmiotów obrabiany, takich jak śruby, uszczelnienia i inne części składowe.
W branży spożywczej technologia ta pomaga w precyzyjnej obsłudze luźnych opakowań lub produktów takich jak owoce i warzywa.
Powiązane pojęcia
Więcej informacji
FAQ - Robotyka - Coboty i lekkie roboty
Znajdź odpowiedzi na pytania dotyczące zautomatyzowanych procesów z użyciem cobotów i chwytaków podciśnieniowych oraz dowiedz się, jak wybrać chwytak podciśnieniowy i generator podciśnienia.

Technika podciśnieniowa dla robotyki
Rozwiązania z zakresu robotyki firmy Schmalz charakteryzują się maksymalną precyzją, bezpieczeństwem i kontrolą procesu chwytania.