
Bin picking
Bin picking verwijst naar een geautomatiseerd proces in de productie en logistiek waarbij robots onderdelen uit een container (de zogenaamde "bin") halen.
Deze technologie wordt voornamelijk gebruikt in industriesegmenten om de productie-efficiëntie te verhogen door het handmatig verwijderen van afzonderlijke onderdelen te vervangen wat tijd en kosten bespaart.
Het geautomatiseerde proces wordt ook gebruikt in het pick-andpackproces, dat essentieel is voor het snel en nauwkeurig selecteren en verpakken van producten. Door het gebruik van moderne robotica in combinatie met robot vision kunnen deze systemen zelfs moeilijk te grijpen werkstukken herkennen, wat de flexibiliteit bij de handling van verschillende werkstukken aanzienlijk verhoogt.
Werking van bin picking systemen
Bij bin picking gebruikt een robot een combinatie van beeldverwerking, sensoren, kunstmatige intelligentie en een grijper om de voorwerpen in de bak te identificeren en te grijpen.

Detectie en lokalisatie van stukken
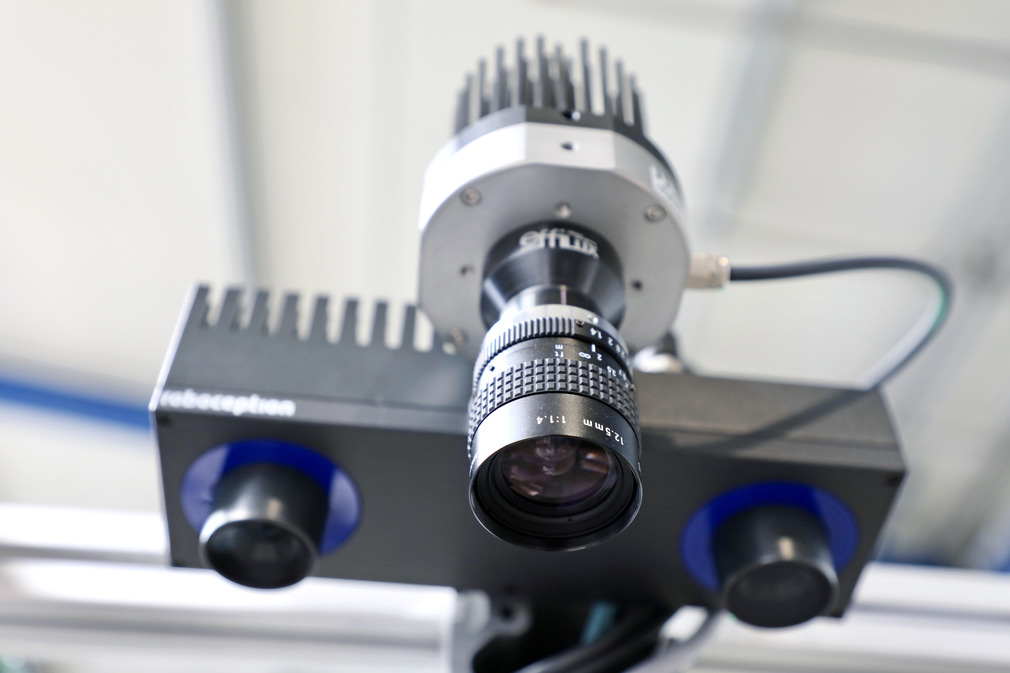
De eerste fase van een bin picking systeem begint met de nauwkeurige detectie van de objecten in de bak. Dit gebeurt met behulp van geavanceerde vision-systemen en 3D-camera's die een gedetailleerde analyse van de bak mogelijk maken. Deze technologieën scannen de werkstukken in de bak en creëren een 3D-puntenwolk die als basis dient voor het verdere proces.
Met behulp van de gegenereerde modelinformatie berekent het systeem de optimale grijperpositie in de bak, zodat de robot het gewenste onderdeel nauwkeurig kan verwijderen zonder onbedoeld andere objecten te verplaatsen of te beschadigen.
Een doorslaggevend voordeel van deze fase is het gebruik van kunstmatige intelligentie (AI) en machine learning. Dankzij deze technologieën kan de robot de exacte positie van elk onderdeel bepalen, zelfs bij een onoverzichtelijke indeling.
Door het continu verbeteren van de grijpersystemen kan de robot ook efficiënt omgaan met complexe en chaotische containers. Dit vermindert niet alleen schaduwvorming (het probleem waarbij stukken niet worden herkend vanwege hun positie of oriëntatie), maar zorgt er ook voor dat elk onderdeel nauwkeurig wordt geïdentificeerd en correct wordt opgepakt.

Grijpen van onderdelen met vacuümtechniek
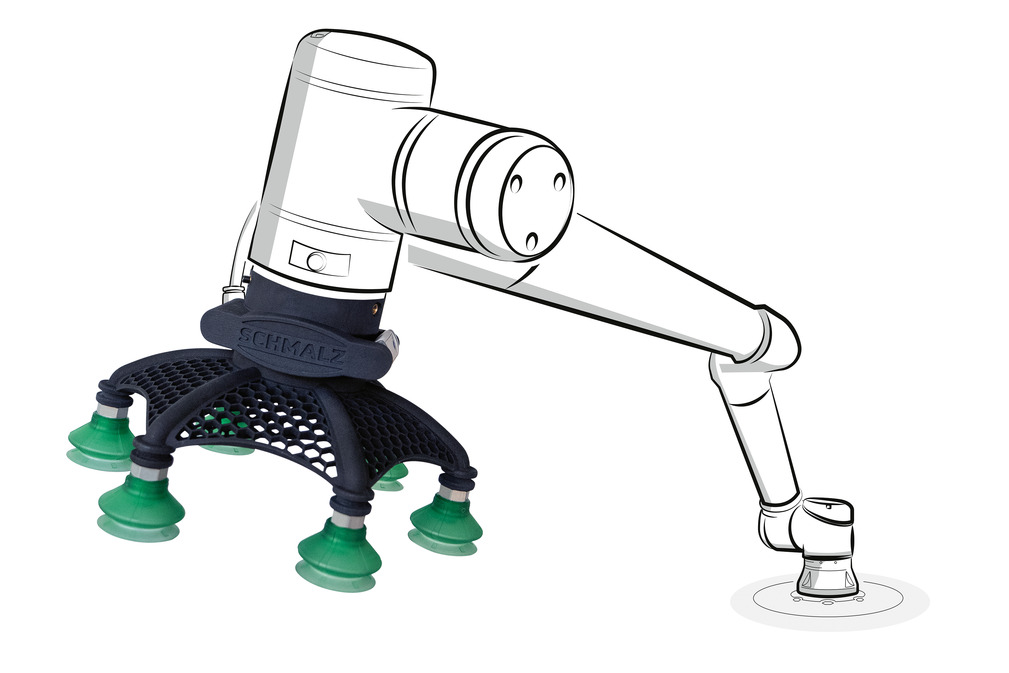
Zodra de positie van de werkstukken bekend is, komt de vacuümtechnologie om de hoek kijken. End-of-arm tooling (EOAT) met vacuümzuignappen tilt de werkstukken uit de bak. Deze zuignappen gebruiken vacuüm om de voorwerpen veilig en stevig vast te pakken zonder ze te beschadigen.
De flexibiliteit van vacuümtechnologie maakt het mogelijk om allerlei bouwvormen en materialen te grijpen, van delicate werkstukken tot zware componenten.

Transport en plaatsing
Nadat het werkstuk is verwijderd, wordt het naar de volgende verwerkings- of productiestap verplaatst.
De robot kan de werkstukken in een specifieke volgorde of volgens het respectieve productievoorschrift op de gewenste locatie plaatsen of ze in een doelcontainer deponeren. Dit verzekert een soepele en efficiënte integratie in het totale productieproces.
Optimalisatie door AI en machine learning
Moderne bin picking sytemen zijn uitgerust met algoritmes die ervoor zorgen dat het systeem zich continu verbetert.
Door machine learning leert de robot van eerdere ervaringen en optimaliseert hij zijn grijpmethoden. Dit resulteert in een hoger rendement, een lager foutenpercentage en een snellere aanpassing aan nieuwe werkstukken of wisselende omstandigheden.
Voordelen van bin picking systemen
Door gebruik te maken van vacuümtechnologie en beeldverwerking kunnen bin picking systemen werkstukken nauwkeurig grijpen en plaatsen. Deze grijpersystemen kunnen een groot aantal verschillende objecten verwerken, ongeacht hun complexiteit of geometrie.
Het geautomatiseerde proces vermindert niet alleen menselijke fouten, maar verhoogt ook de productiesnelheid, waardoor het rendement aanzienlijk toeneemt.
Een bijkomend voordeel van deze technologie is dat het werknemers ontlast, omdat repetitieve, fysiek inspannende taken zoals het handmatig vastgrijpen van voorwerpen worden overgenomen.
Dit bevordert ergonomie op de werkvloer door fysieke belasring voor werknemers te verlagen en tegelijkertijd de werkomgeving veiliger te maken.

Applicaties
Bin picking heeft applicaties in tal van isectoren, waaronder de automotive industrie, elektronicaproductie, de voedingsmiddelenindustrie en logistiek.
In de automobielindustrie wordt bin picking bijvoorbeeld gebruikt om werkstukken zoals schroeven, afdichtingen en andere componenten automatisch uit te nemen en verder te verwerken.
In de verpakkingsindustrie helpt de technologie bij de nauwkeurige handling van losse verpakkingen of producten zoals fruit en groenten.
Verwante termen
Meer informatie
EOAT: End-of-arm tooling voor robotica en automatisering
Rondom efficiënt grijpen: EOAT oplossingen van Schmalz voor veelzijdige, procesveilige handling in de automatisering.
FAQ - Robotica - Cobots & lichtgewicht robots
Hier vindt u antwoorden op vragen over geautomatiseerde processen met cobots en vacuümgrijpers, en hoe u uw vacuümgrijper en vacuümgenerator selecteert.

Vacuümtechniek voor Robotica
Robotoplossingen van Schmalz worden gekenmerkt door maximale precisie, veiligheid en proces sturing in het grijpproces.