End-of-arm tooling (EOAT)
Veilige en efficiënte processen in industriesegmenten en logistiek met EOAT van Schmalz
Veilige en efficiënte processen in industriesegmenten en logistiek met EOAT van Schmalz
End-of-arm tooling (EOAT) zijn de speciale gereedschappen gemonteerd aan het einde van robotarmen en andere automatiseringssystemen die werkstukken grijpen, verplaatsen en positioneren. Ze verhogen de productiviteit, verlagen de proceskosten en zijn belangrijke componenten in moderne toepassingen voor automatisering en handling.
Producten van Schmalz verzekeren maximale precisie, veiligheid en sturing van het proces. Zo kunt u geautomatiseerde werkstromen efficiënt implementeren en continue optimaliseren.
Schmalz werkt samen met toonaangevende fabrikanten van robots om op maat gemaakte EOAT's te ontwikkelen. Onze gebruiksklare kabelsets zijn afgestemd op uw applicaties en productieprocessen en bevatten niet alleen de grijper, maar ook de bijpassende flens en aansluitkabels.














Industriekennis, succesverhalen en applicatievideo's voor uw automatiseringsoplossingen.
Selectiehulpen, configurators en de Schmalz Calculator voor eenvoudige, efficiënte procesplanning.
Schmalz staat voor klantnabijheid, betrouwbaar advies en knowhow.

Met EOAT verbinden we robots en werkstukken - en creëren zo de basis voor productiviteit, ergonomie en kostenefficiëntie in automatisering.∼ Dr. Maik Fiedler (lid van de Raad van Bestuur en hoofd van de business unit Vacuüm automatisering)
.jpg)
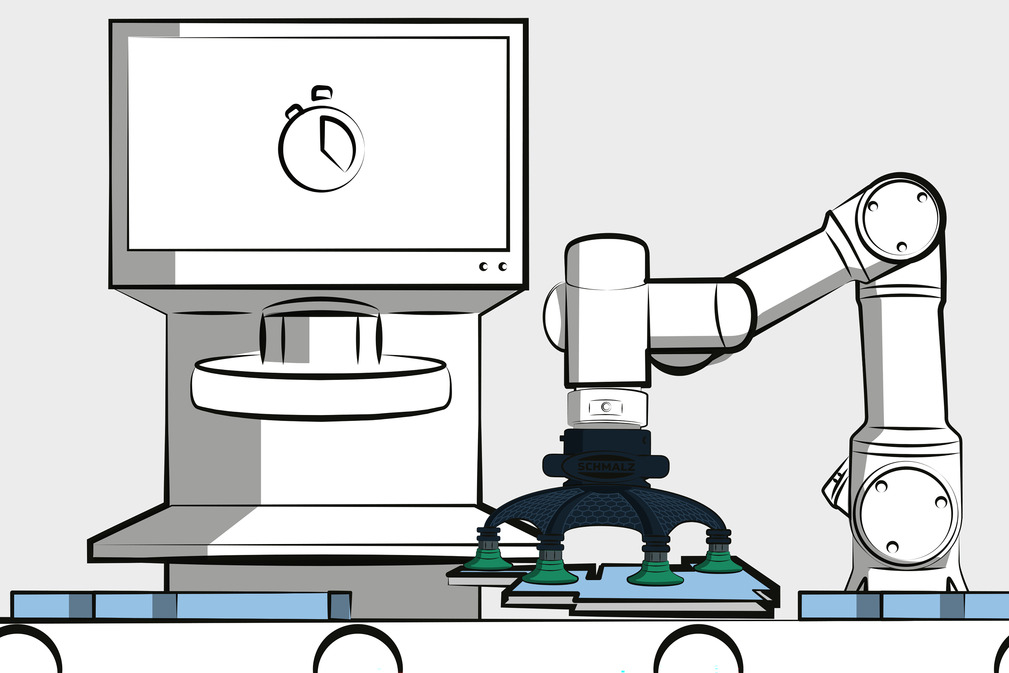
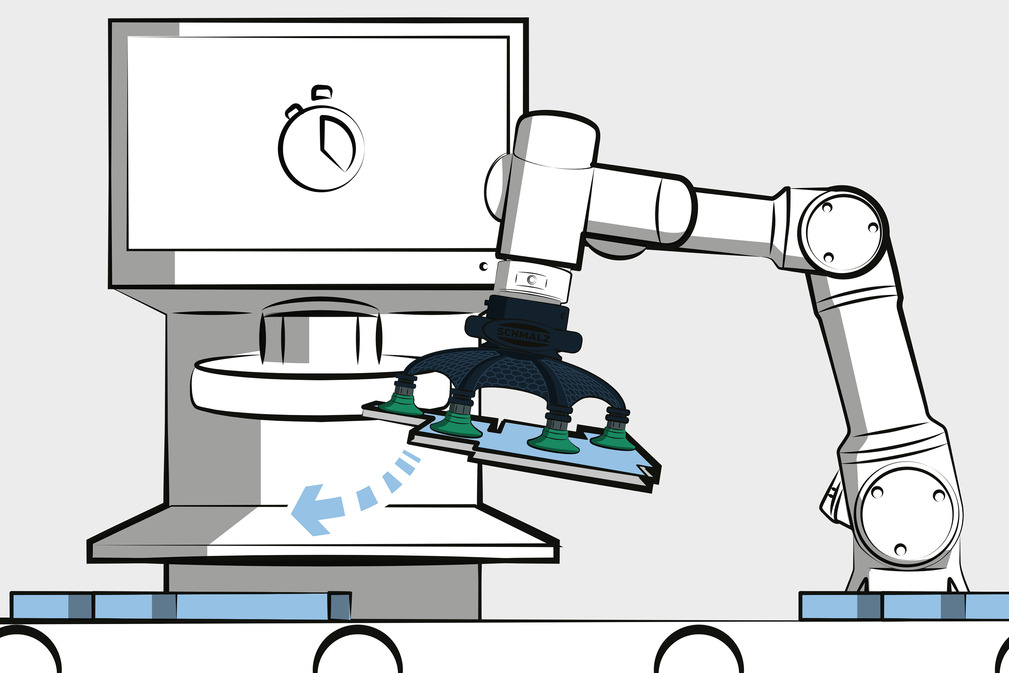
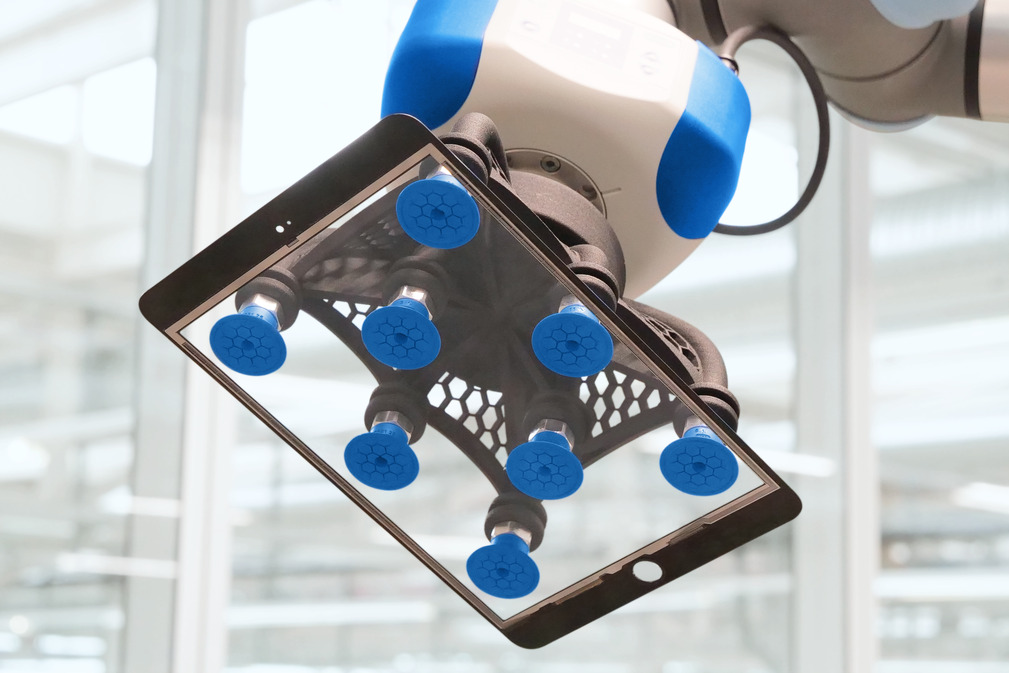
Een EOAT-systeem bestaat uit verschillende componenten die samenwerken om de handling van werkstukken te verzekeren. De robot (1) dient als basis en voert de bewegingen uit. De robot is via de flens (2) verbonden met de vacuümgenerator (3) en genereert het benodigde vacuüm. Daaronder bevindt zich de vacuümgrijper (4), hier als voorbeeld getoond met zuignappen die het werkstuk (5) veilig oppakken. Het systeem wordt bestuurd via een operatorpaneel (6), terwijl de software (app) (7) wordt gebruikt voor het programmeren en instellen van het systeem.
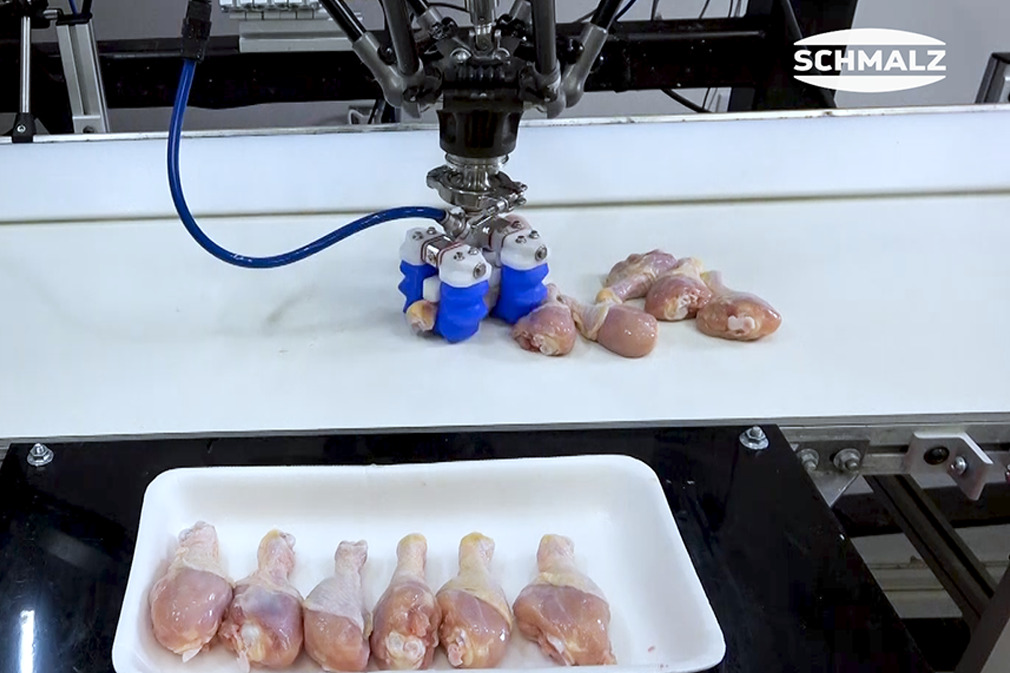
Ontdek praktische video's die grijpsystemen van Schmalz in actie tonen. Onze EOAT oplossingen laten aan de hand van echte applicaties zien hoe u uw applicaties efficiënt kunt automatiseren en de meest uiteenlopende werkstukken veilig kunt hanteren.

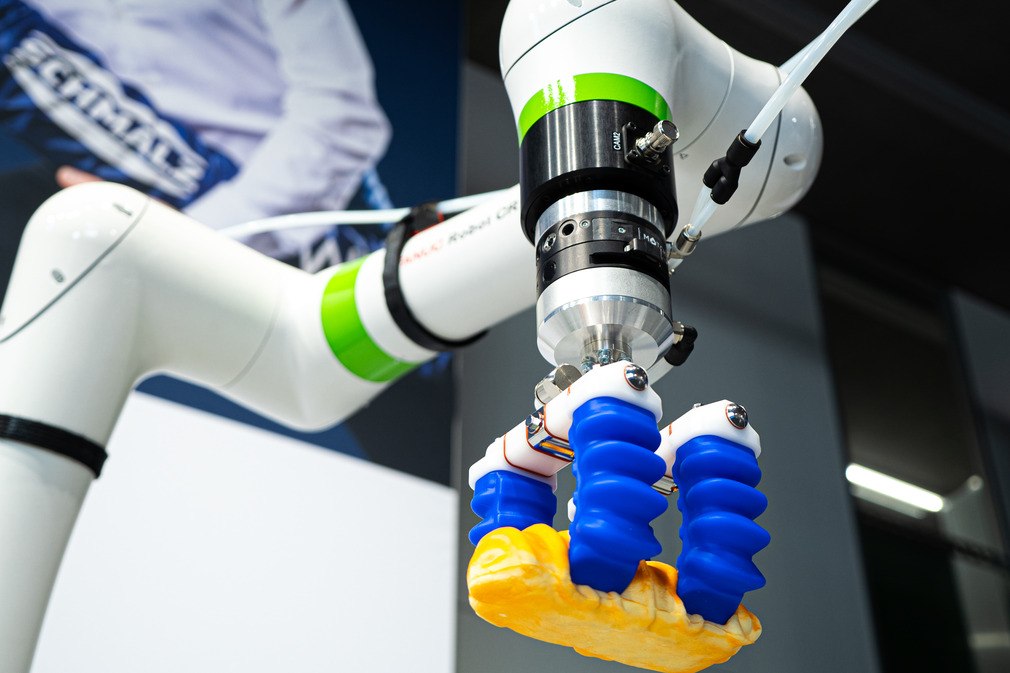
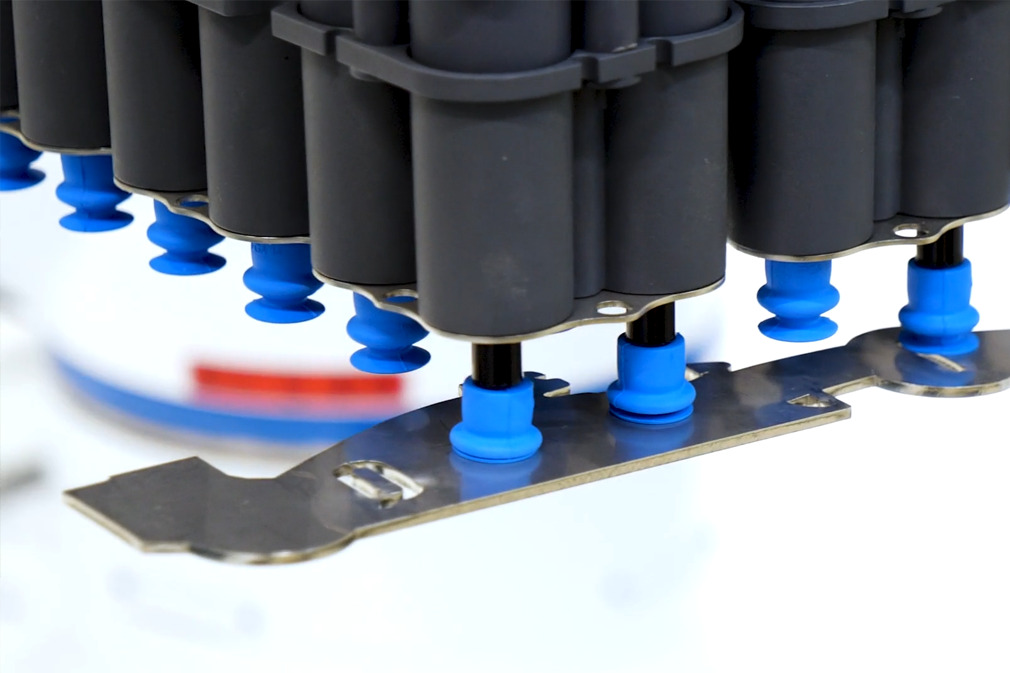
De buigslapheid van EOAT oplossingen is cruciaal voor bedrijven die moeten inspelen op veranderende productie voorschriften. Vacuümgrijpers zijn niet beperkt tot één activiteit, maar kunnen op vele manieren worden aangepast aan verschillende applicaties en wisselende werkstukken.
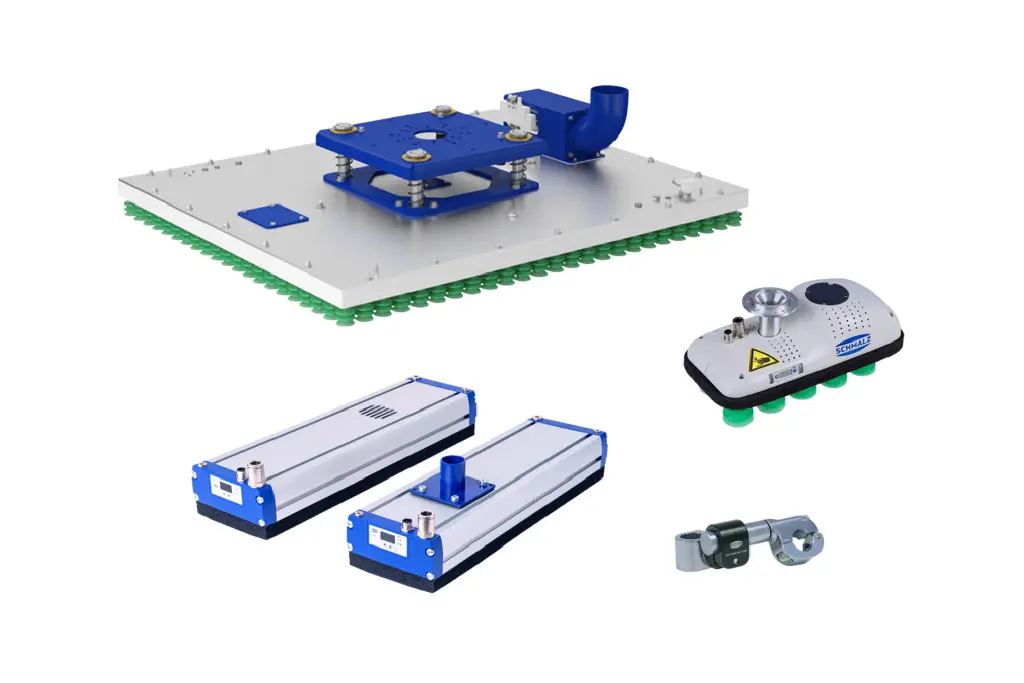
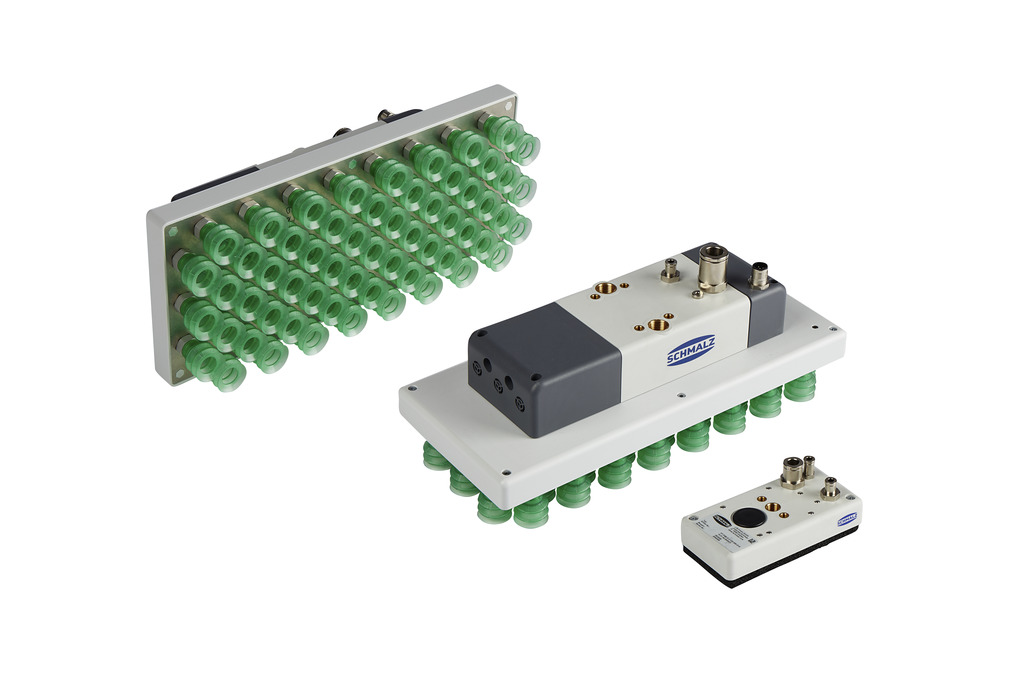
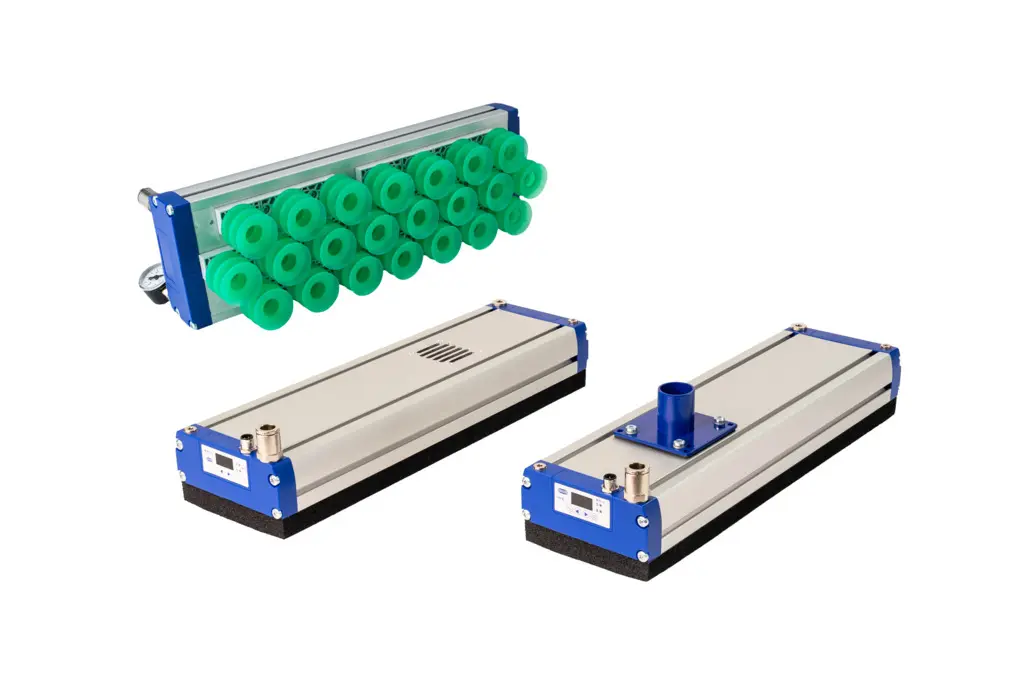
Of u nu werkstukken vacuüm, magnetisch of mechanisch wilt handling: Schmalz biedt individuele componenten, gebruiksklare sets en complete grijpsystemen voor uw applicatie.
Onze modulaire oplossingen kunnen snel worden geïntegreerd in bestaande systemen en zijn schaalbaar voor verschillende grootte van batches. Van selectie tot in bedrijfname ondersteunen wij u met technisch advies en praktische functietests om een betrouwbare werking van uw proces te verzekeren.














Elke seconde telt
Deurfabrikant PRÜM herstructureerde zijn procesketen om de processen in de fabriek te optimaliseren. Ook het laden en lossen van de verwerkingsmachine werd op de proef gesteld. Samen met vacuümspecialist Schmalz vond het bedrijf een oplossing die niet alleen het proces versnelde, maar ook de energiekosten merkbaar verlaagde.
Nieuw
Elektrisch aangedreven: hoe vacuüm mobiel wordt
Modulaire fabrieken, mobiele robotica en stijgende energieprijzen veranderen de automatisering fundamenteel. In steeds meer gevallen opent dit een alternatief voor traditionele persluchtsystemen: elektrische vacuümopwekking, die een nieuwe mate van vrijheid biedt. Het maakt zelfvoorzienende grijpoplossingen mogelijk, vermindert energieverliezen en wordt naadloos geïntegreerd in digitale productieomgevingen.
EOAT is de sleutel tot flexibele automatisering
Dr. Maik Fiedler is lid van de bedrijfsleiding en hoofd van de business unit vacuüm automatisering bij Schmalz. In dit interview legt hij het strategische belang uit van end-of-arm tooling (EOAT) voor automatisering en beschrijft hij hoe Schmalz de verbinding tussen robot en werkstuk ontwerpt.

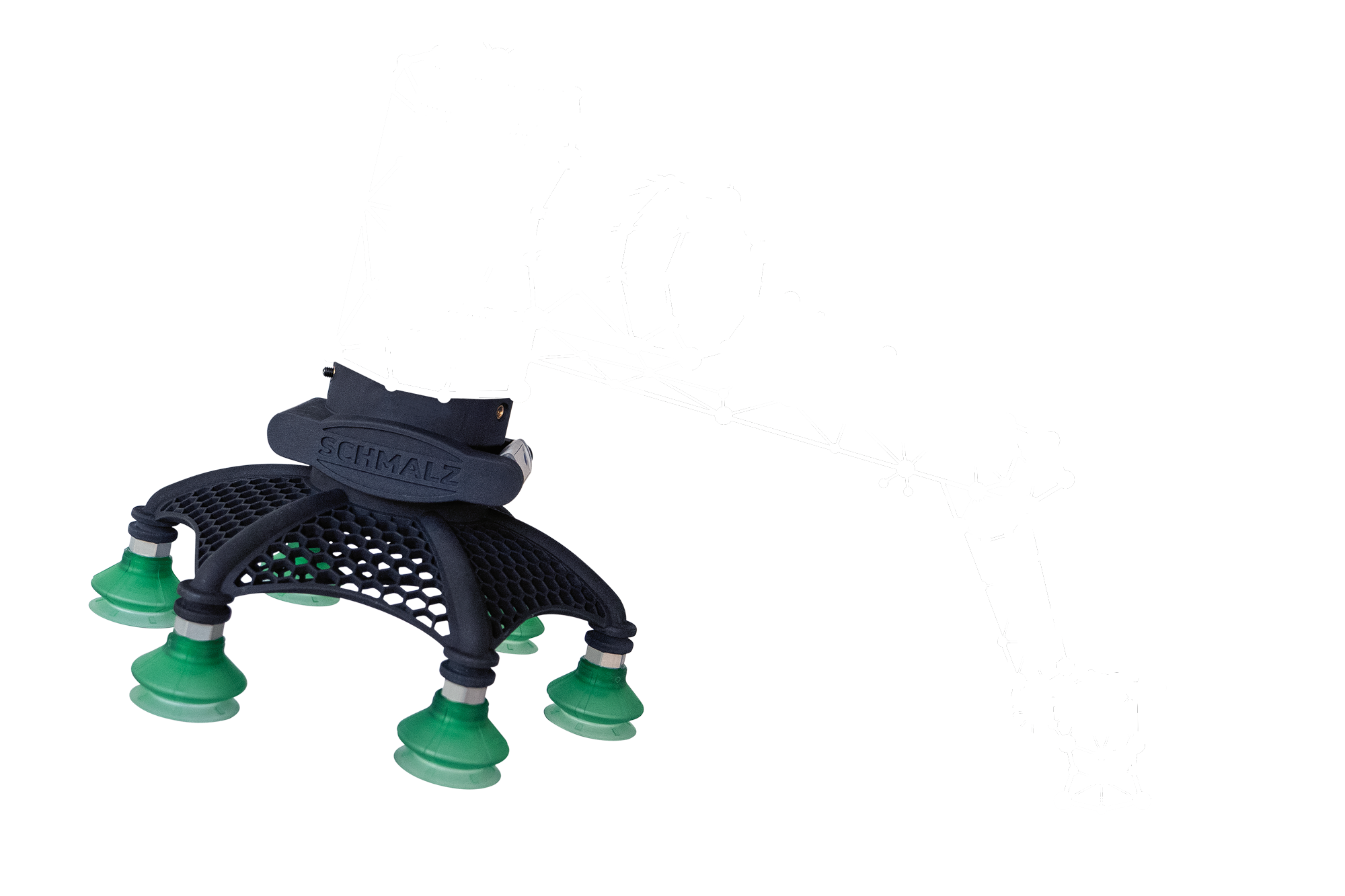
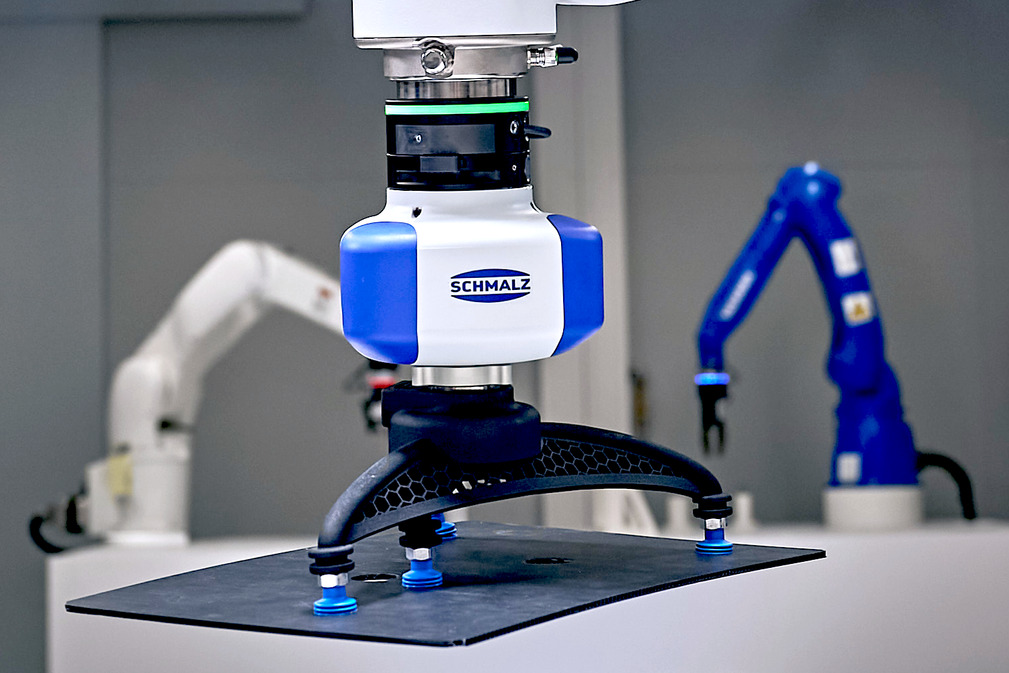
End-of-arm tooling (EOAT) van Schmalz maakt de nauwkeurige en veilige implementatie van intelligente automatiseringsoplossingen mogelijk. De combinatie van specifieke vacuüm componeneten en grijpersystemen zorgt voor zeer efficiënte complete systemen die een maximale buigslapheid bieden in verschillende applicaties. Onze focus ligt op vermogen en gebruiksvriendelijke vacuümtechniek die u tal van voordelen biedt:
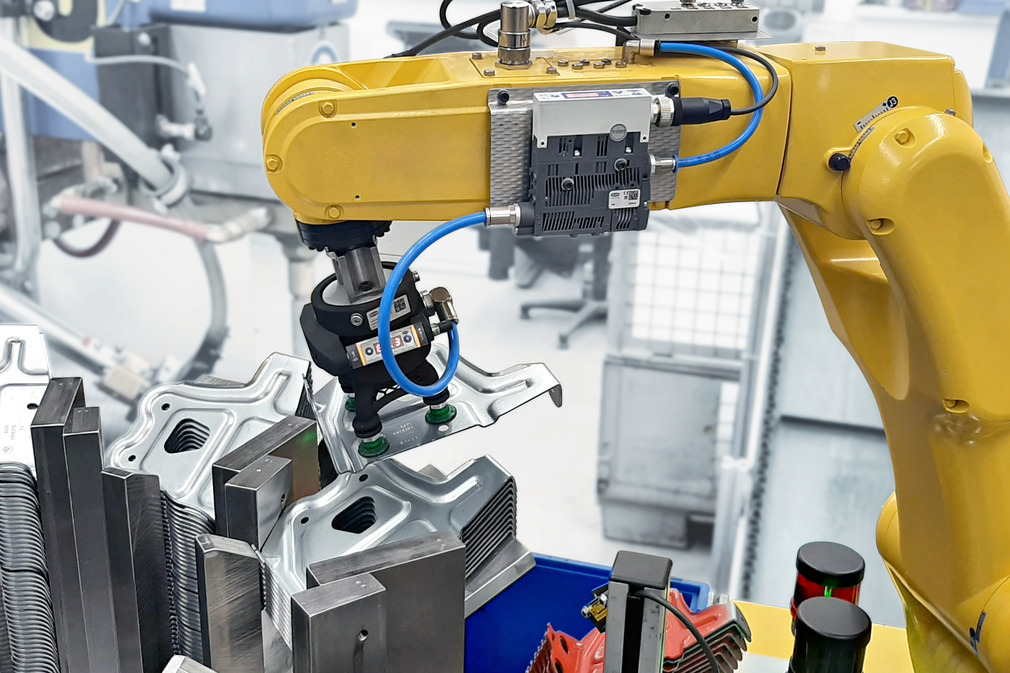
Robotoplossingen van Schmalz worden gebruikt voor laad- en losmachines, voor het verzamelen, palletiseren en depalletiseren of voor bin picking processen. Het assortiment omvat gestandaardiseerde en configureerbare eindeffectoren, modulaire grijpersystemen, vision & handling sets en elektrische en pneumatische vacuümgeneratoren.
Onze oplossingen voor grijpers zijn compatibel met alle gangbare lichtgewicht robots en cobots en worden geleverd als gebruiksklare sets. Uitgerust met communicatie-interfaces voor bidirectionele data-uitwisseling, met diagnostische functies voor het grijpsysteem, met vision-systemen voor grijppuntdetectie of ecosystemen voor automatisch grijpers vervangen, speelt de grijper een centrale rol in het totale systeem.
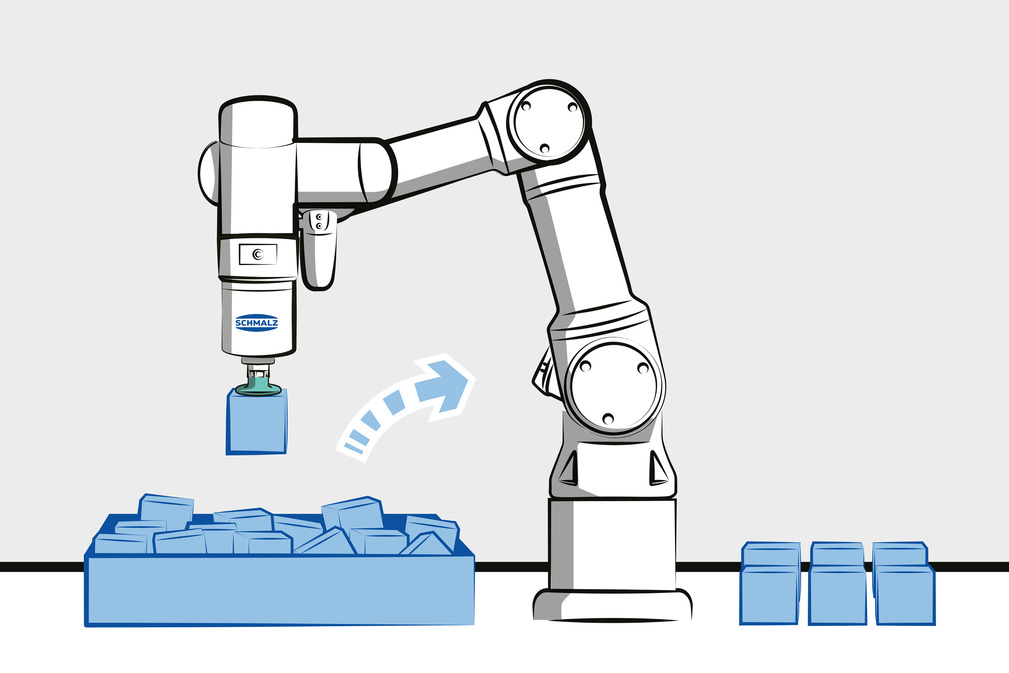
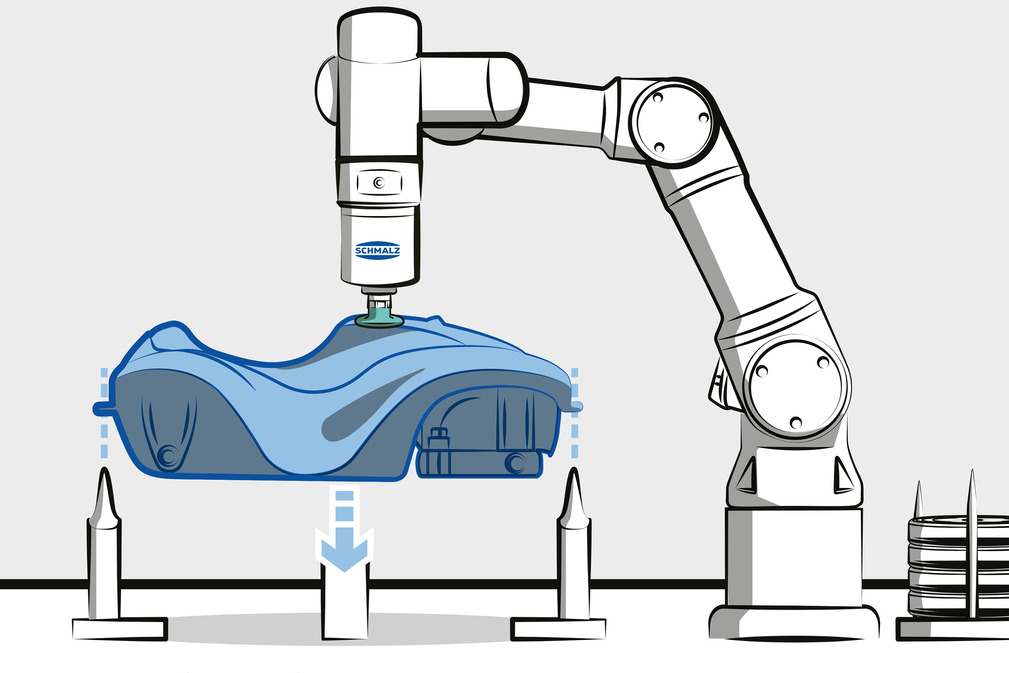
In deze applicatie neemt de EOAT het picken en plaatsen van de werkstukken over. Hij pikt ze op van een gedefinieerde locatie en plaatst ze op een andere, even gedefinieerde positie.
Dankzij de hoge precisie en herhalingsnauwkeurigheid kan de EOAT dergelijke taken 24 uur per dag betrouwbaar uitvoeren. Terugkerende taken kunnen eenvoudig geprogrammeerd, opgeslagen en op elk moment opgehaald worden.
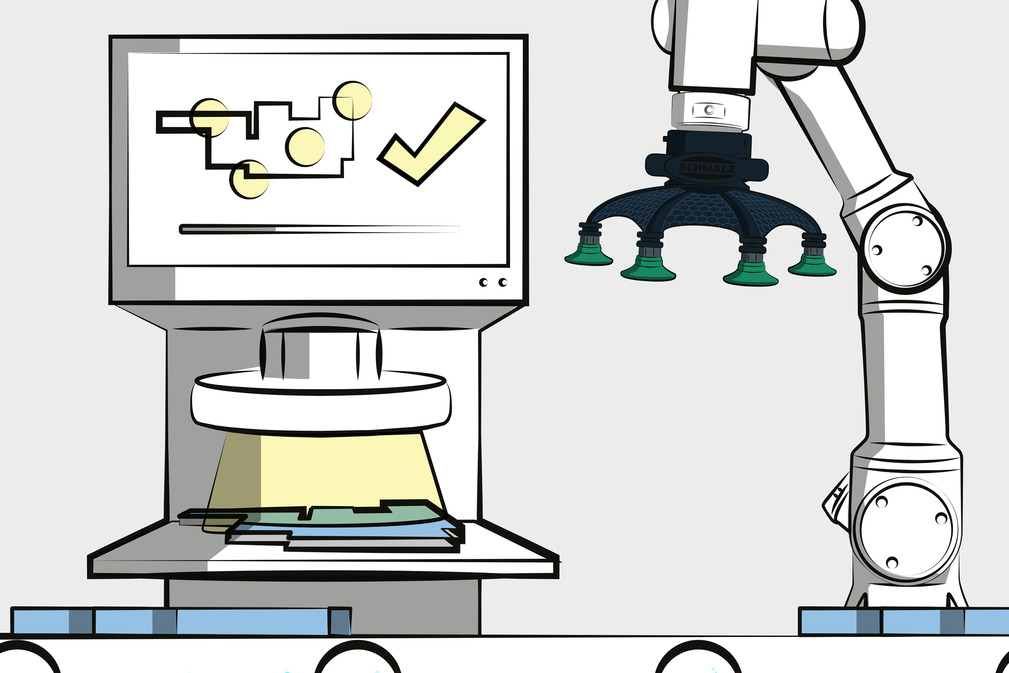
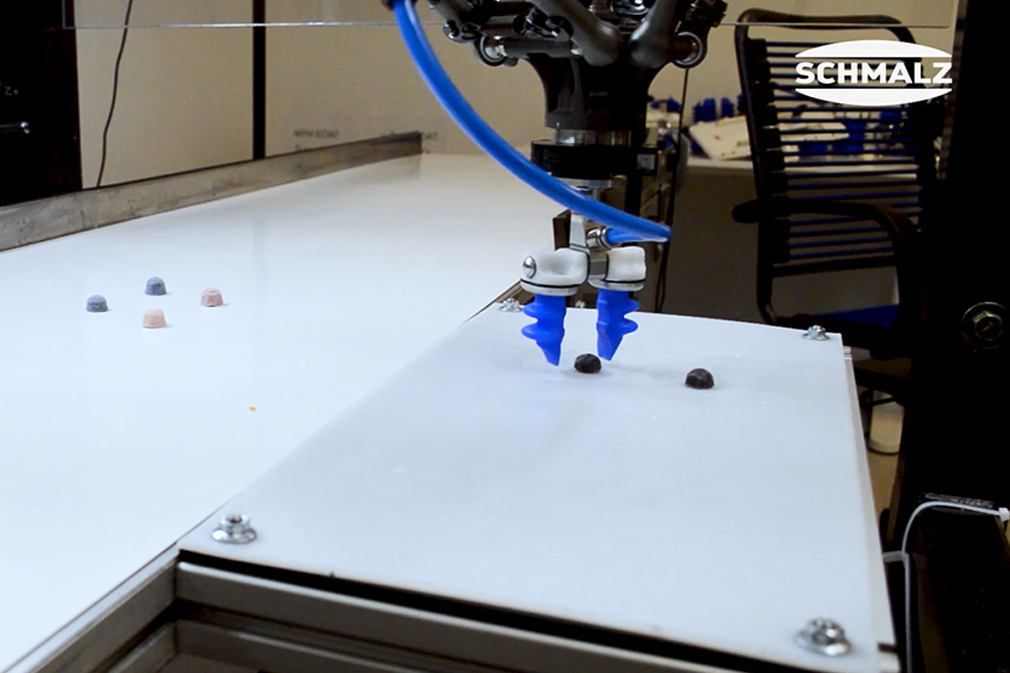
Een bijzonder veeleisende variant is de zogenaamde "bin picking". In dit geval identificeert een camerasysteem de betreffende componenten, zodat de EOAT deze zelfstandig uit de bak kan halen. In combinatie met een cobot ontstaat zo een flexibele oplossing voor geautomatiseerde processen voor het picken en plaatsen.
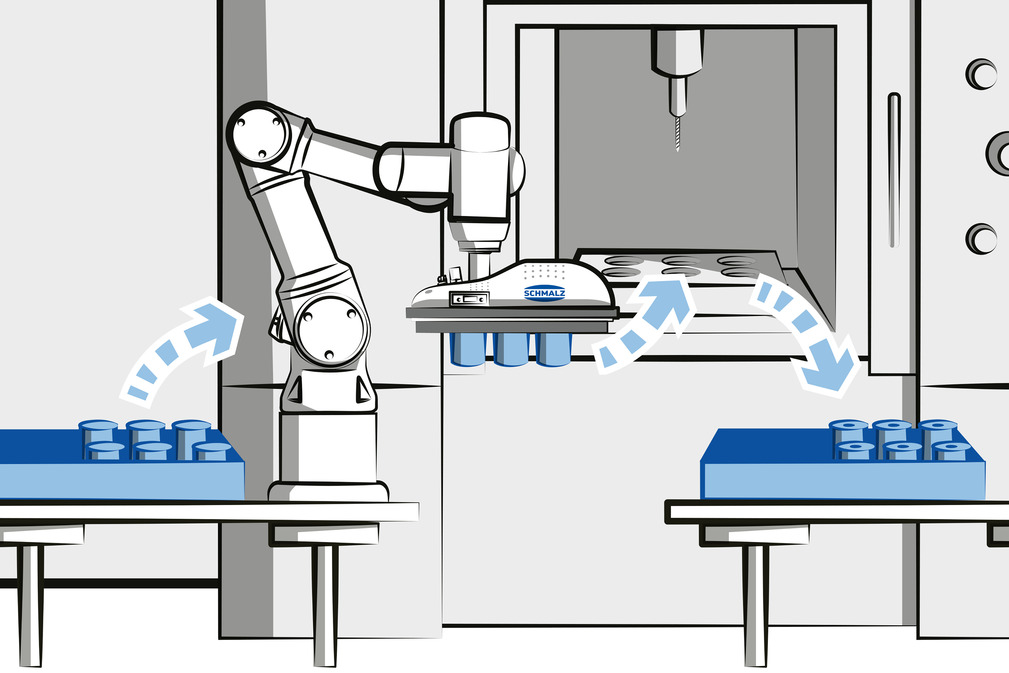
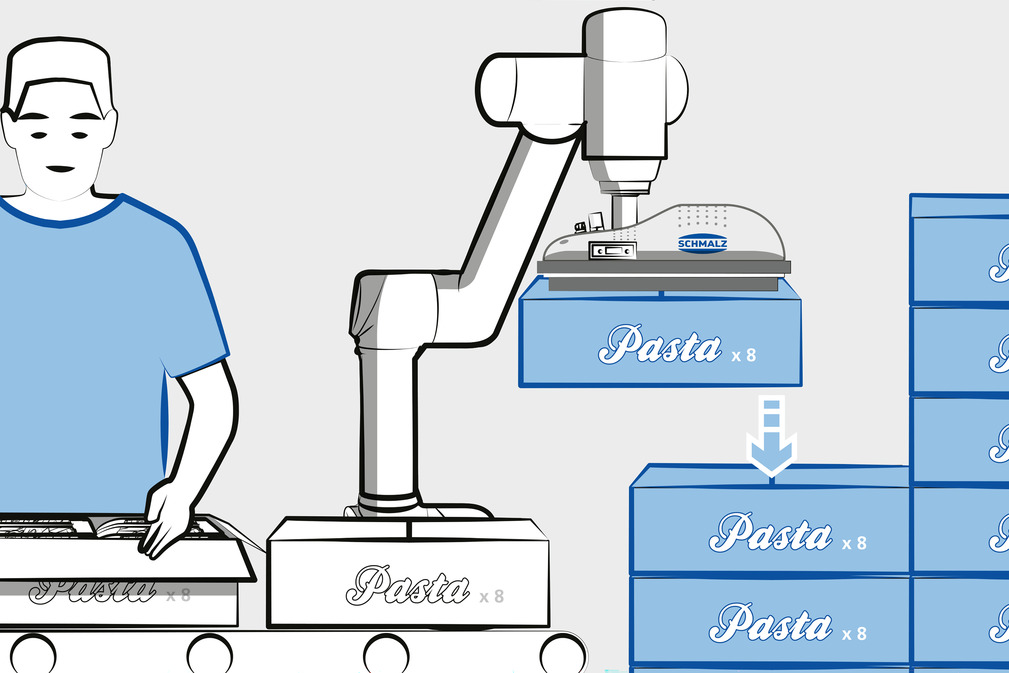
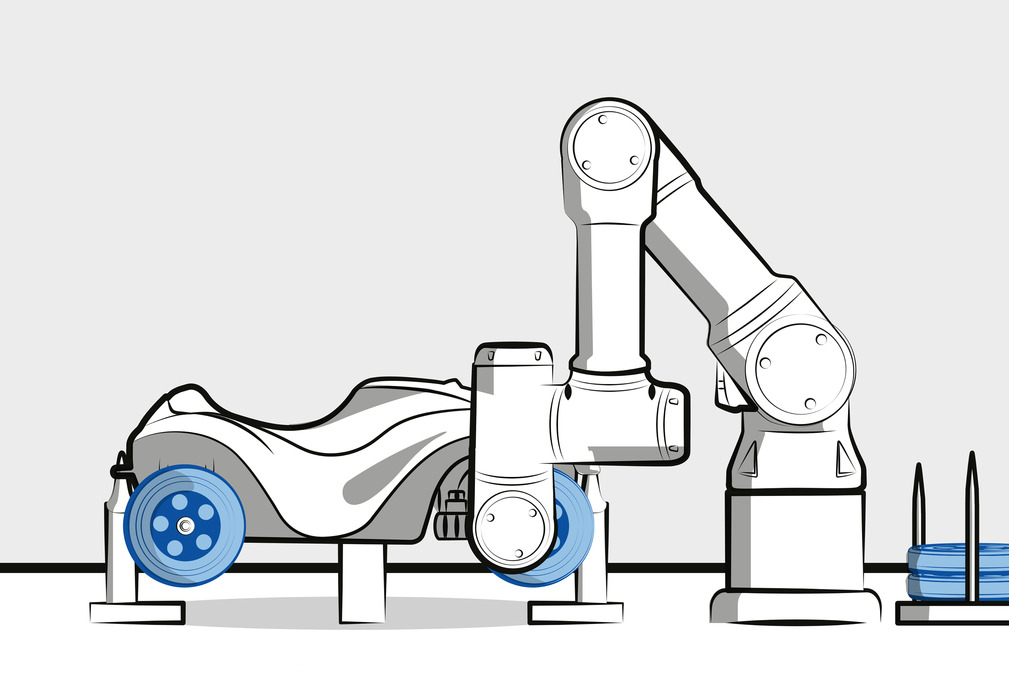
EOAT grijpersystemen ontlasten geschoolde werknemers optimaal door het monotone laden en lossen van machines te automatiseren. Bovendien, omdat cobots met EOAT constant leverbaar zijn en dag en nacht kunnen werken, worden stilstandtijden van machines aanzienlijk verkort. Zodra het proces is voltooid, ontlaadt de EOAT de machine onmiddellijk en laadt deze opnieuw met nieuwe artikelnr. Cobots hebben hiervoor niet veel ruimte nodig en handmatige operators kunnen de machines nog steeds bedienen. Uitgerust met vacuümgrijpers bieden EOAT-systemen een uitzonderlijke buigslapheid en kunnen ze verschillende werkstukken op verschillende machines hanteren.
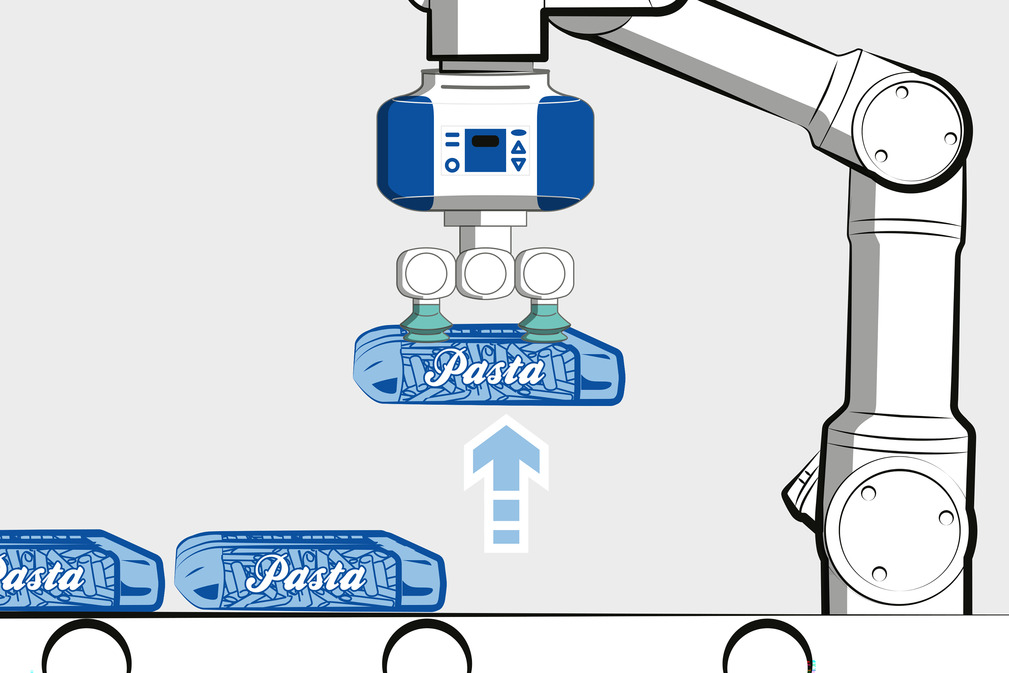
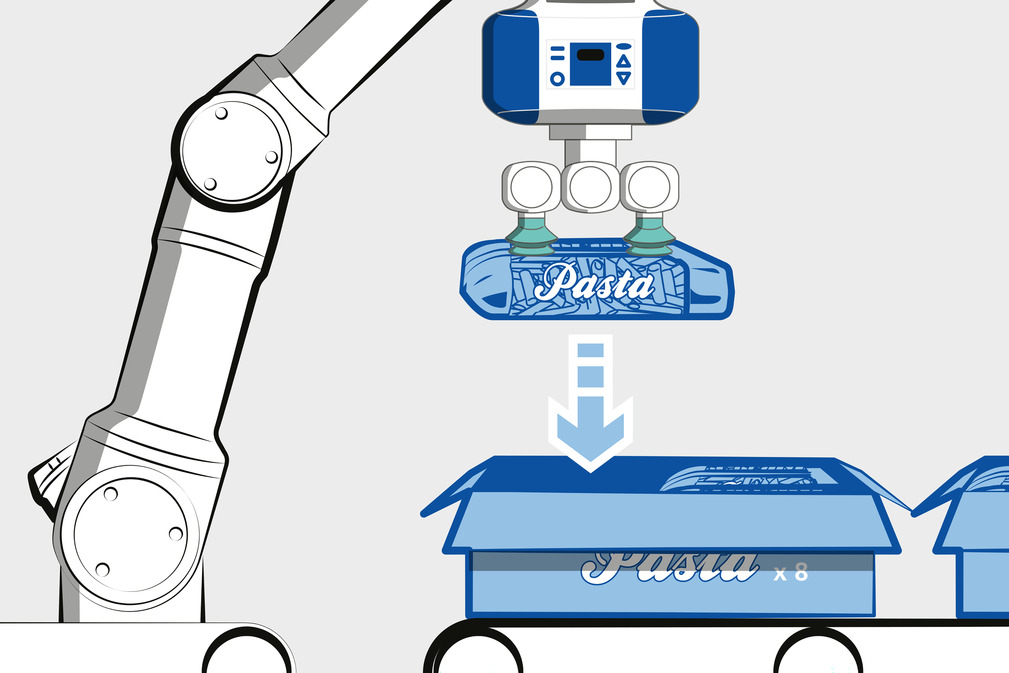
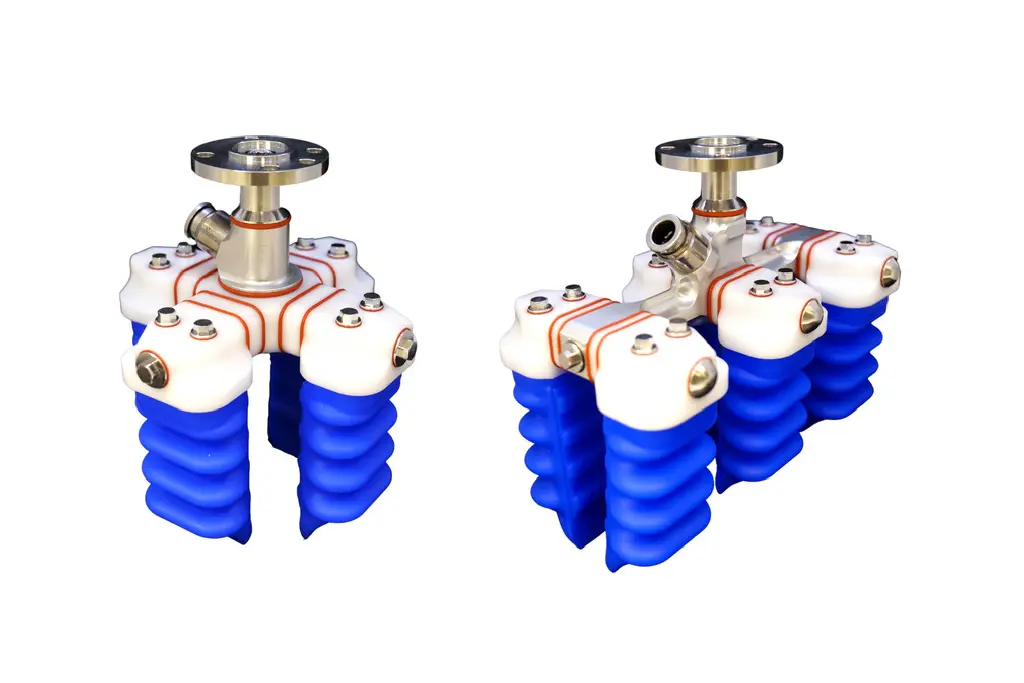
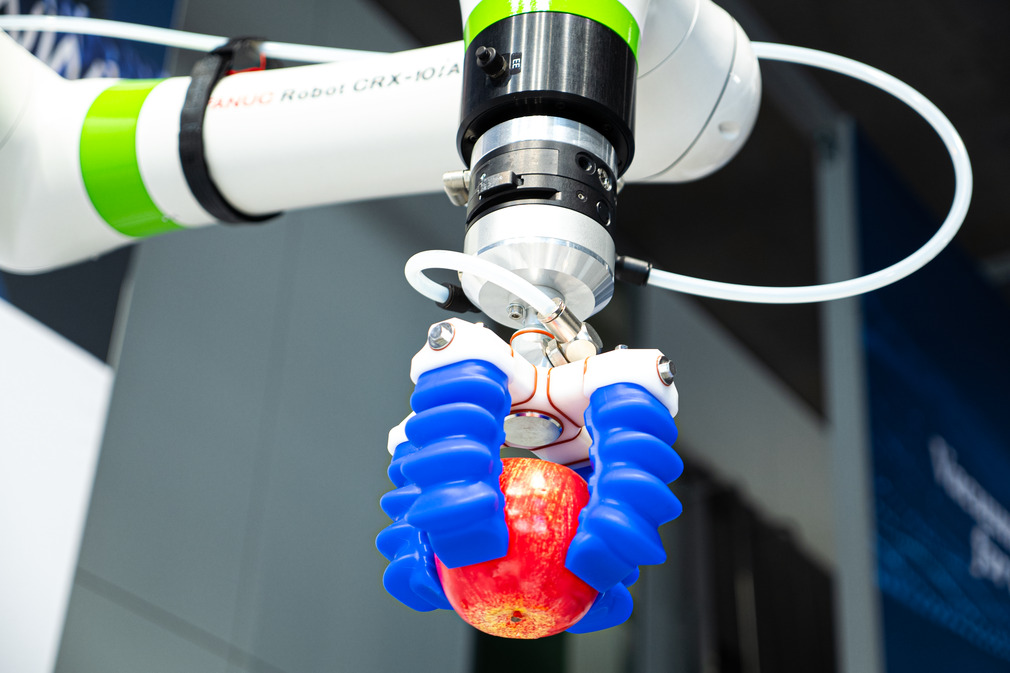
De vacuümgrijper verplaatst zelfs zacht en delicaat materiaal en onregelmatige bouwvormen veilig en voorzichtig. Zodra de producthoeveelheid en de betreffende doelpositie zijn opgeslagen, worden de onderdelen systematisch geplaatst totdat het karton vol is. De verpakte stukken worden netjes op de pallets gestapeld in de door de mens gespecificeerde posities.
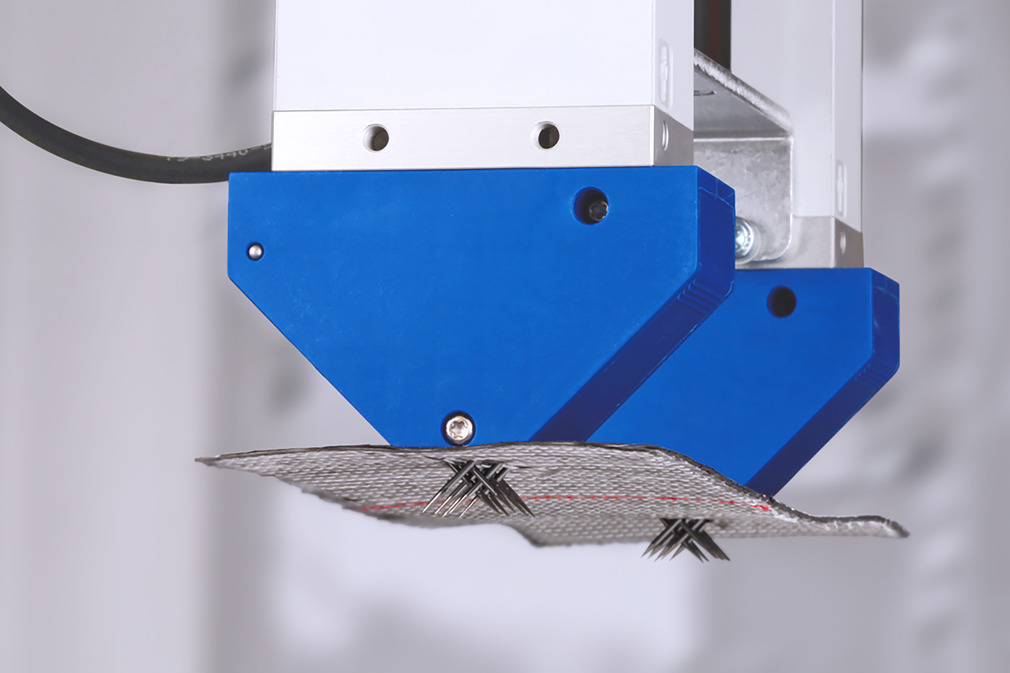
De vacuümgrijper van de EOAT behandelt de stukken met minimale markeringen en positioneert ze precies in de gespecificeerde positie voor analyse- of testprocessen. De stukken worden geïnspecteerd of verwerkt door de machine. Zodra het proces is voltooid, wordt de cobot geïnformeerd. Tijdens inspectieprocessen ontvangt de cobot een signaal dat aangeeft of het geïnspecteerde stuk moet worden doorgestuurd voor verdere verwerking of moet worden gesorteerd.
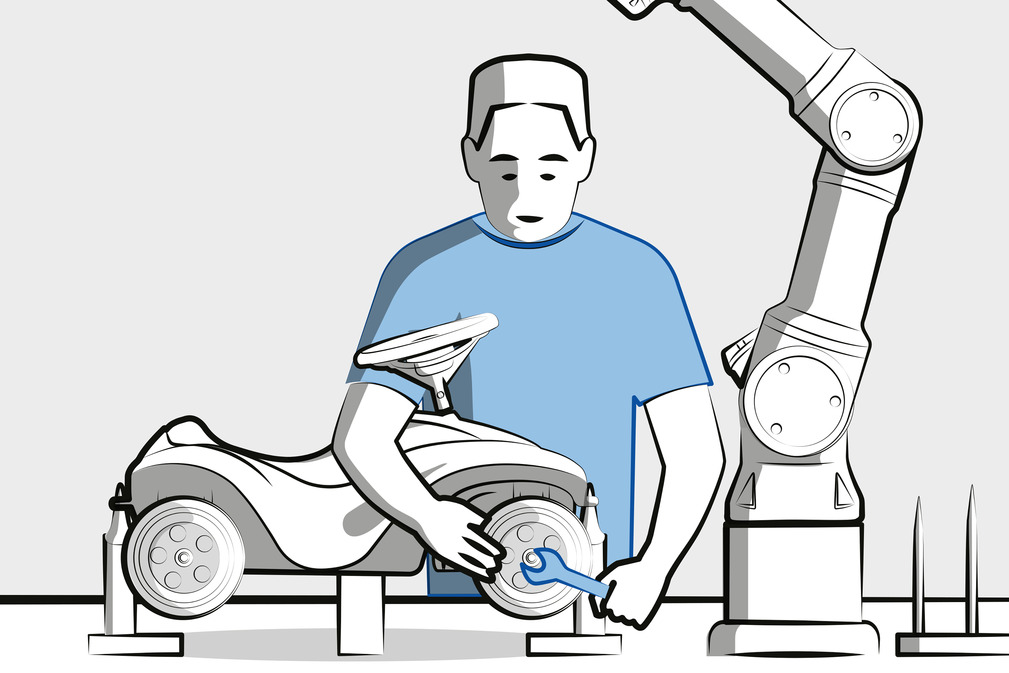
De vacuümgrijper van de EOAT pakt de werkstukken van bovenaf op en plaatst ze betrouwbaar in de gewenste positie. De afzonderlijke componenten worden achter elkaar gepakt en gemonteerd. Eenmaal opgeslagen kunnen de werkstappen zo vaak als nodig herhaald worden. Zonder ruimtelijke scheiding nemen de vacuümgrijpers monotone taken over. Mensen bewaken, sturing en toezicht houden op de processen.

Generatorstraat 34
7556 RC Hengelo












.jpg)