Outils d'effecteurs de fin (EOAT)
Des processus sûrs et efficaces dans l'industrie et la logistique grâce aux EOAT de Schmalz
Des processus sûrs et efficaces dans l'industrie et la logistique grâce aux EOAT de Schmalz
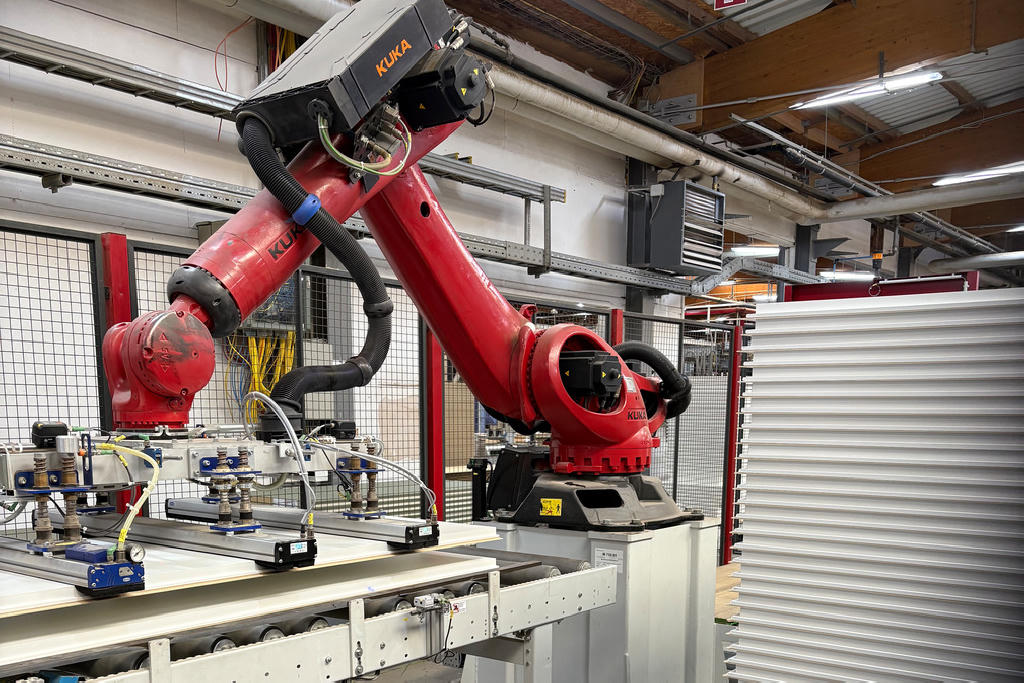
Les outils de fin de bras (EOAT) sont les outils spéciaux montés à l'extrémité des bras robotisés et d'autres systèmes d'automatisation qui saisissent, déplacent et positionnent les pièces. Ils augmentent la productivité, réduisent les coûts du procédé et sont des composants clés dans les applications modernes d'automatisation et de manipulation.
Les produits Schmalz garantissent une précision, une sécurité et un contrôle des processus maximaux. Cela vous permet de mettre en œuvre des flux de travail automatisés de manière efficace et de les optimiser en continu.
Schmalz collabore avec les principaux fabricants de robots pour développer des EOAT personnalisés. Nos kits de manipulation prêts à être raccordés sont adaptés à vos applications et à vos processus de production. Ils comprennent non seulement la pince, mais aussi la bride et les câbles de connexion correspondants.














Connaissances sectorielles, exemples de réussite et vidéos d'application pour vos solutions d'automatisation.
Aides à la sélection, configurateurs et calculateur Schmalz pour une planification simple et efficace des processus.
Schmalz est synonyme de proximité avec le client, de conseils fiables et de savoir-faire.

Avec EOAT, nous connectons les robots et les pièces - et créons ainsi la base de la productivité, de l'ergonomie et du rendement dans l'automatisation.∼ Dr. Maik Fiedler (Membre du conseil d'administration et responsable de l'unité commerciale "Automatisation par vide")
.jpg)
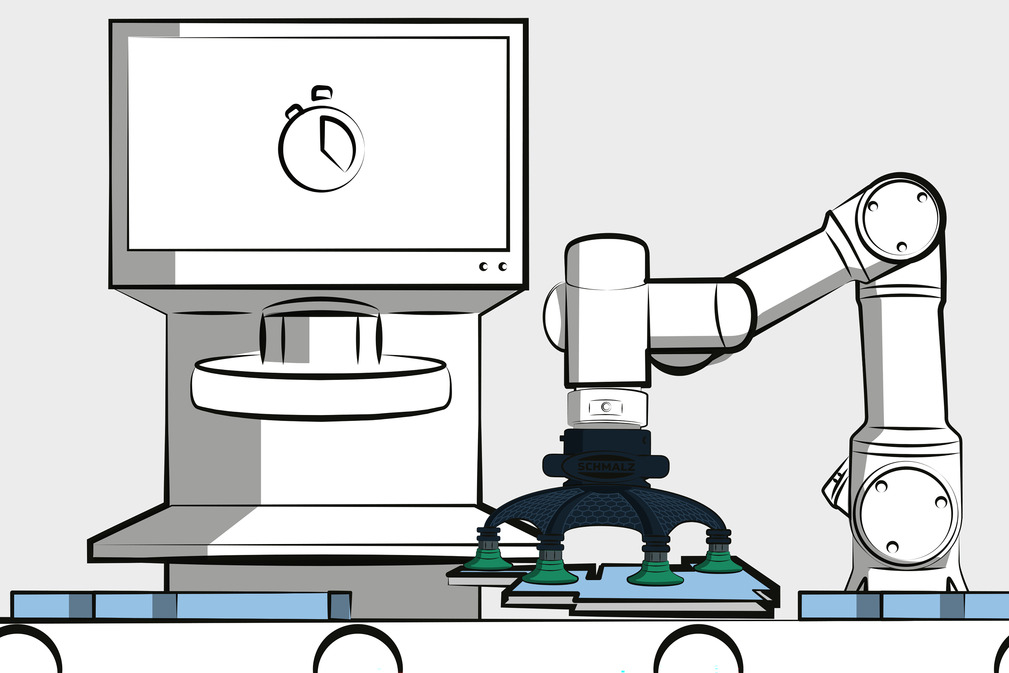
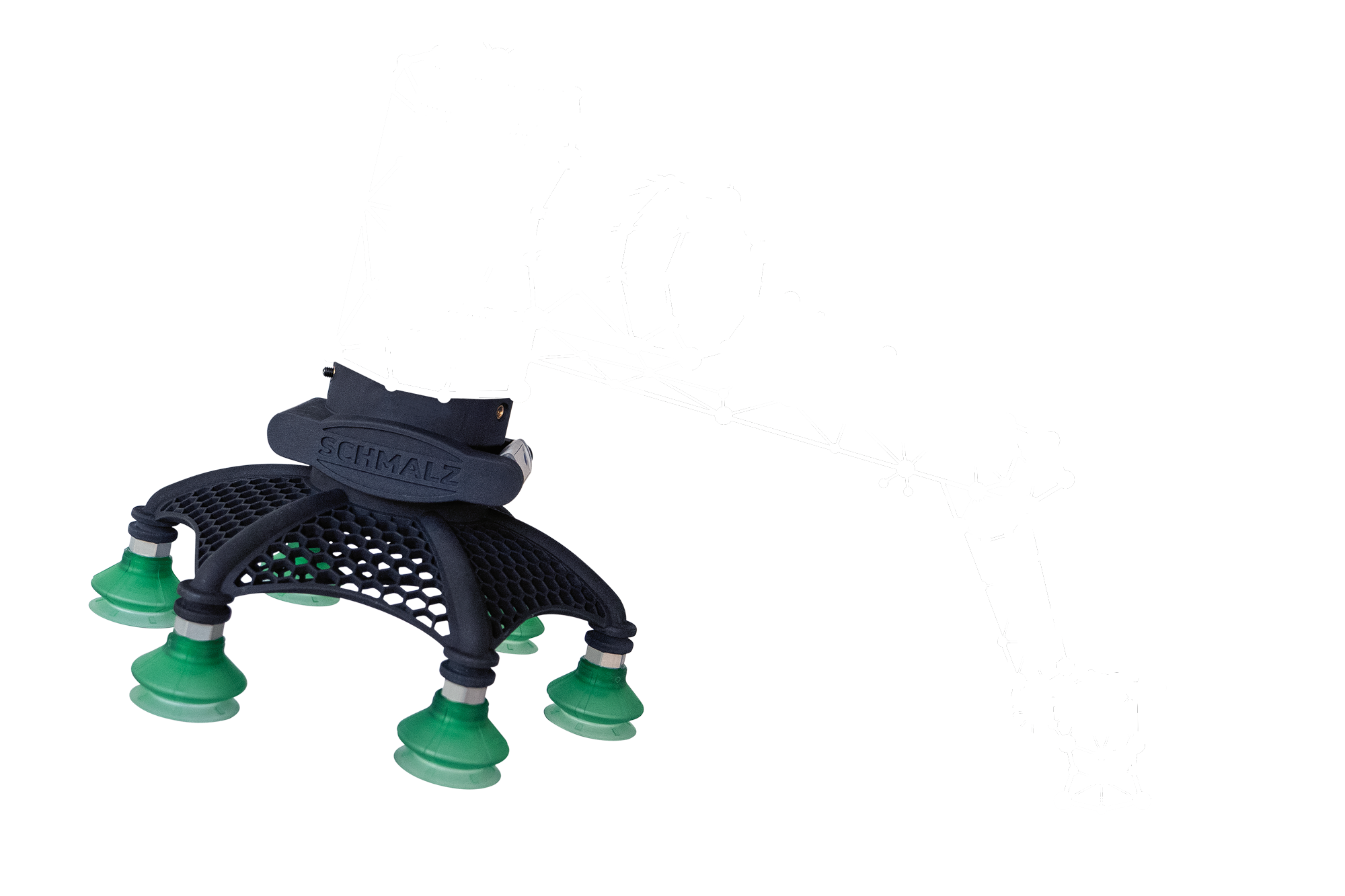
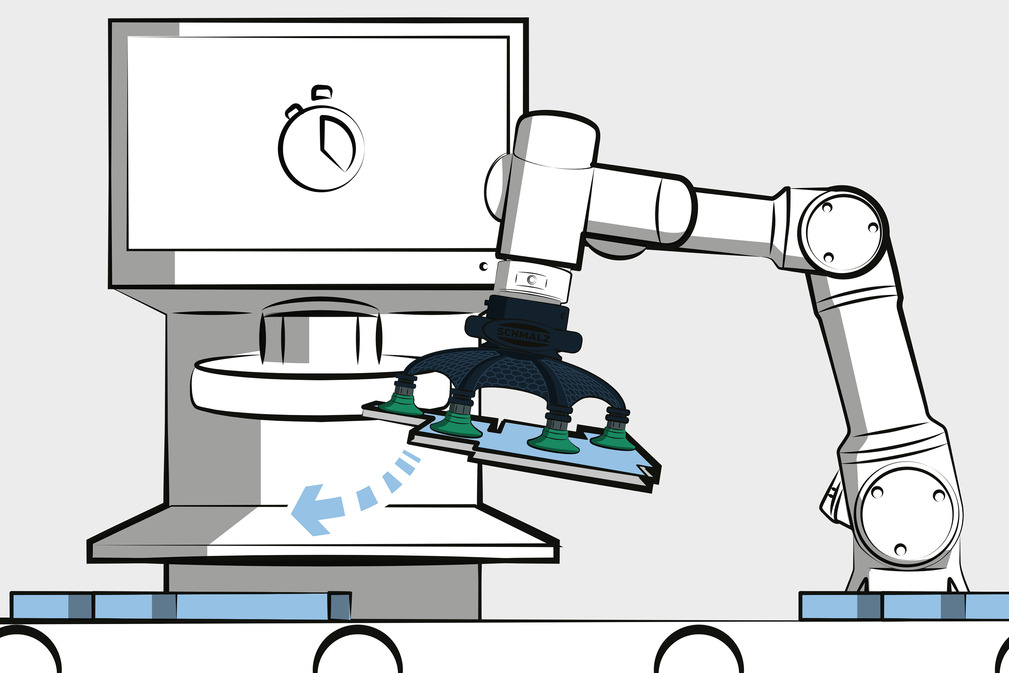
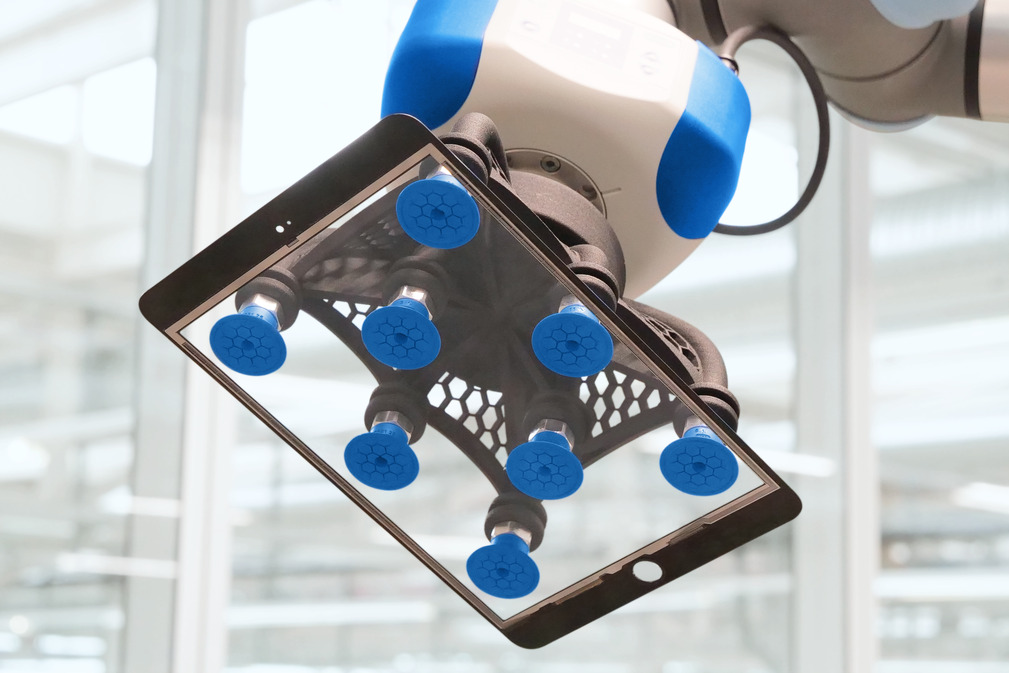
Un système EOAT se compose de plusieurs composants qui travaillent ensemble pour assurer la manipulation des pièces. Le robot (1) sert de base et effectue les mouvements. Le robot est raccordé au générateur de vide (3) via la bride (2) et génère le vide nécessaire. En dessous se trouve le préhenseur par vide (4), représenté ici à titre d'exemple avec des ventouses qui saisissent la pièce en toute sécurité (5). Le système est commandé par un panneau d'opérateur (6), tandis que le logiciel (app) (7) sert à programmer et à régler le système.
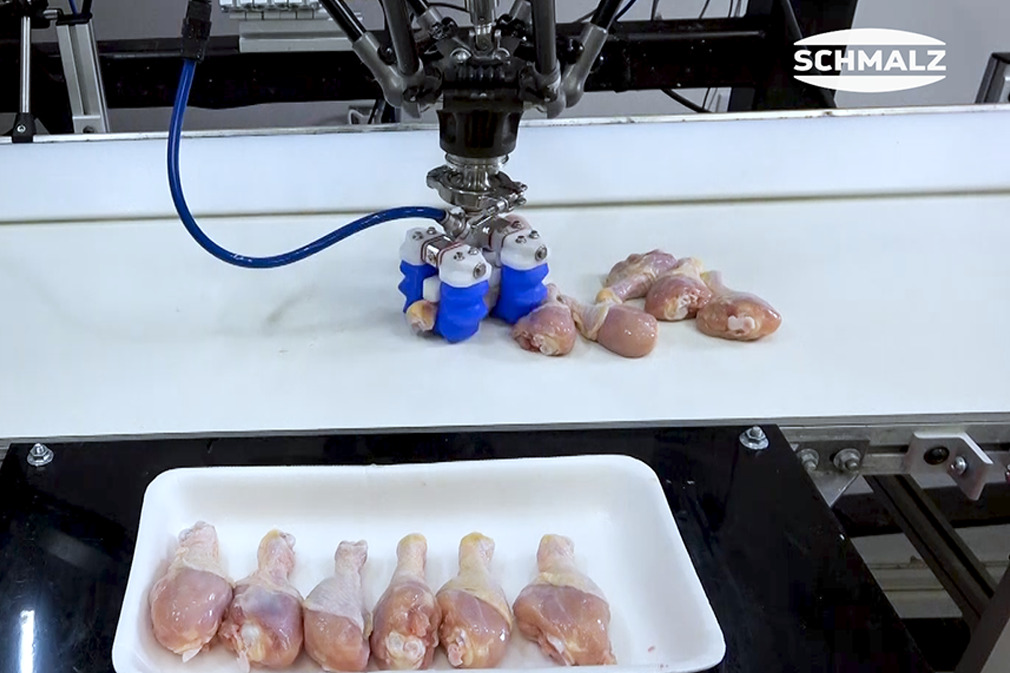
Découvrez des vidéos pratiques qui montrent les systèmes de préhension Schmalz en action. Nos solutions EOAT s'appuient sur des applications réelles pour démontrer comment vous pouvez automatiser vos applications de manière efficace et manipuler une grande variété de pièces en toute sécurité.

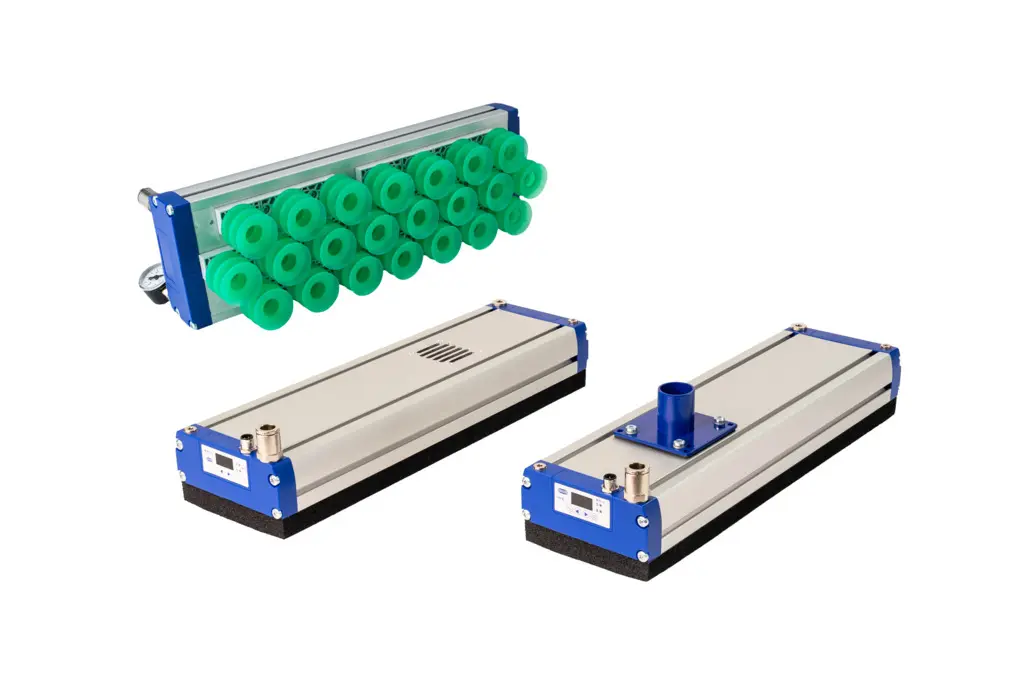
La flexibilité des solutions EOAT est cruciale pour les entreprises qui doivent répondre à des exigences de production changeantes. Les préhenseurs par le vide ne sont pas limités à une seule activité, mais peuvent être adaptés de multiples façons à différentes applications et à des pièces variées.
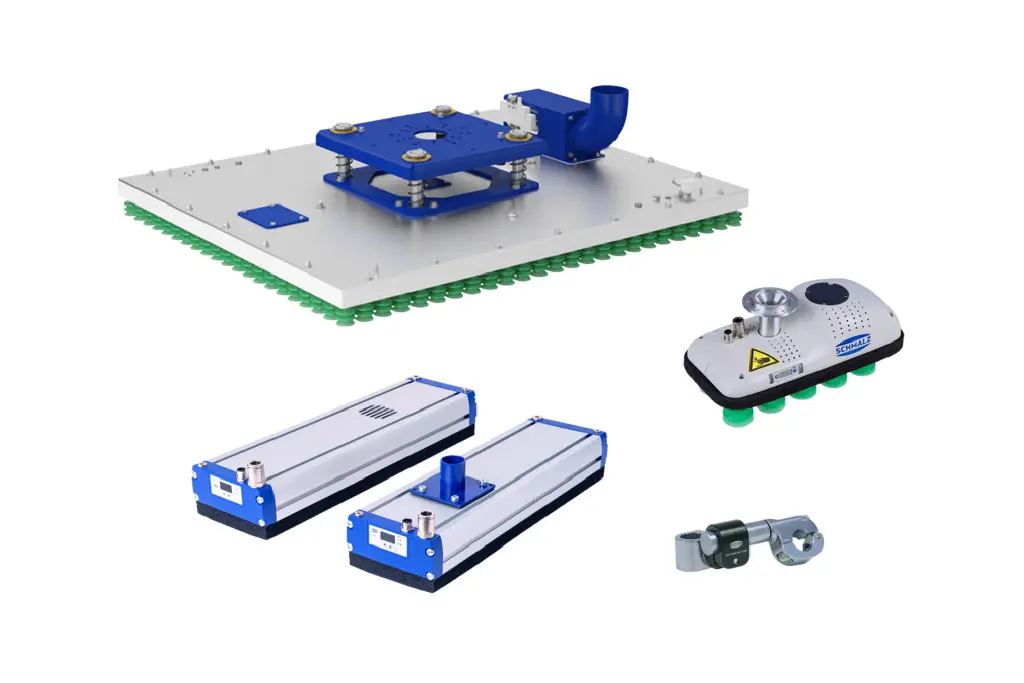
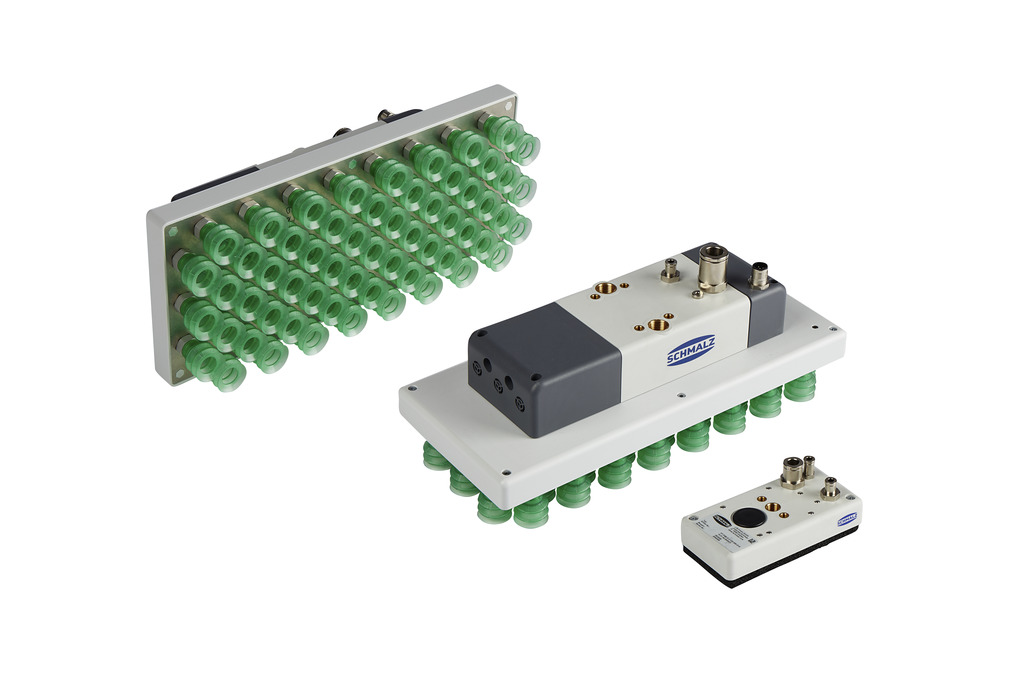
Que vous souhaitiez manipuler des pièces à l'aide du vide, de manière magnétique ou mécanique : Schmalz propose des composants individuels, des ensembles prêts à raccorder et des systèmes de préhension complets pour votre application.
Nos solutions modulaires s'intègrent rapidement dans les systèmes existants et sont évolutives pour différentes tailles de lots. De la sélection à la mise en service, nous vous accompagnons avec des conseils techniques et des tests de fonctionnement pratiques afin de garantir la fiabilité de votre processus.














Chaque seconde compte
Le fabricant de portes PRÜM a restructuré sa chaîne de procédés afin d'optimiser les traitements dans l'usine. Le chargement et le déchargement de la machine de traitement ont également été mis à l'épreuve. En collaboration avec le spécialiste du vide Schmalz, l'entreprise a trouvé une solution qui a permis non seulement d'accélérer le procédé, mais aussi de réduire sensiblement les coûts énergétiques.
Nouveau
La puissance électrique : Comment le vide devient mobile
Les usines modulaires, la robotique mobile et la hausse des prix de l'énergie modifient fondamentalement l'automatisation. Dans un nombre croissant de cas, cela ouvre une alternative aux systèmes d'air comprimé traditionnels : la génération de vide électrique, offre de nouveaux degrés de liberté. Elle permet des solutions de préhension autosuffisantes, réduit les pertes d'énergie et s'intègre parfaitement dans les environnements de fabrication numérique.
L'EOAT est la clé d'une automatisation souple
Maik Fiedler est membre de la direction de l'entreprise et responsable du secteur d'activité automatisation par vide chez Schmalz. Dans cet entretien, il explique l'importance stratégique des effecteurs de fin (EOAT) pour l'automatisation et décrit comment Schmalz construit la connexion entre le robot et la pièce.

Les outils de fin de bras (EOAT) de Schmalz permettent la mise en œuvre précise et sûre de solutions d'automatisation intelligentes. La combinaison de composants à vide spécifiques et de systèmes de préhension crée des systèmes complets hautement efficaces qui offrent une flexibilité maximale dans diverses applications. Nous nous concentrons sur une technologie à vide puissante et conviviale qui vous offre de nombreux avantages :
Les solutions robotiques de Schmalz sont utilisées pour le chargement et le déchargement de machines, pour la préhension, la palettisation et la dépalettisation ou pour les processus de prélèvement dans des bacs. La gamme comprend des effecteurs terminaux standardisés et configurables, des systèmes de préhension modulaires, des kits de vision et de manipulation ainsi que des générateurs de vide électriques et pneumatiques.
Nos solutions de préhension sont compatibles avec tous les robots légers et cobots courants et sont fournies sous forme de kits prêts à connecter. Équipé d'interfaces de communication pour l'échange bidirectionnel de données, de fonctions de diagnostic pour le processus de manipulation, de systèmes de vision pour la détection des points de préhension ou d'écosystèmes pour le changement automatisé des préhenseurs, le préhenseur joue un rôle central dans l'ensemble du système.
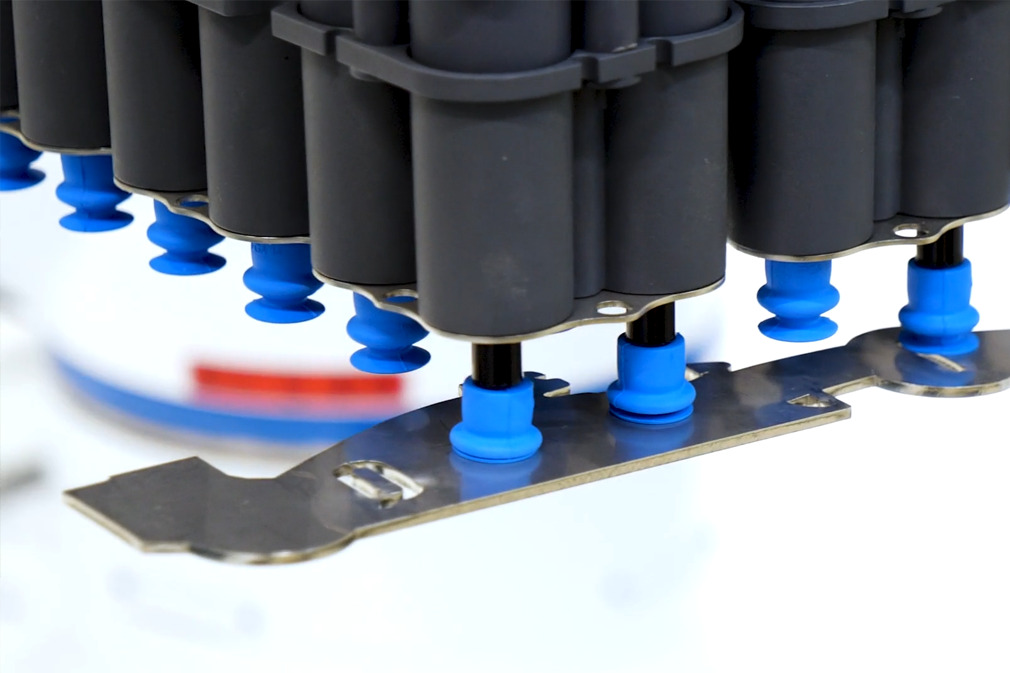
Dans cette application de manipulation, l'EOAT prend en charge la préhension et le placement des pièces. Il les prélève à un emplacement défini et les place à un autre emplacement, également défini.
Grâce à sa grande précision et à sa reproduction, l'EOAT peut effectuer ces tâches 24 heures sur 24, en toute fiabilité. Les tâches récurrentes peuvent être facilement programmées, sauvegardées et récupérées à tout moment.
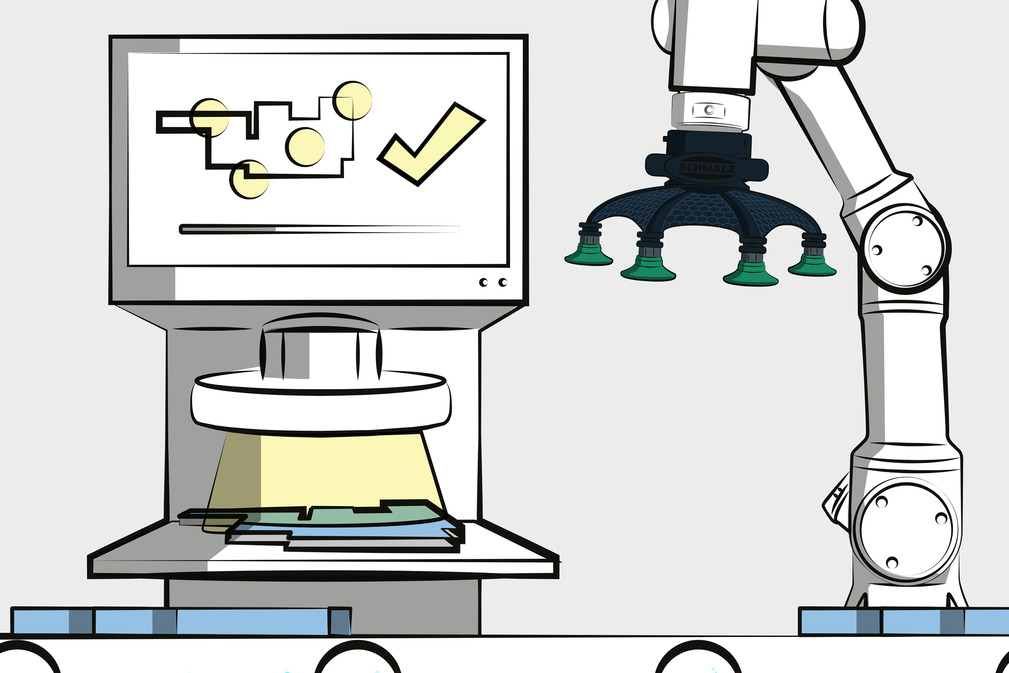
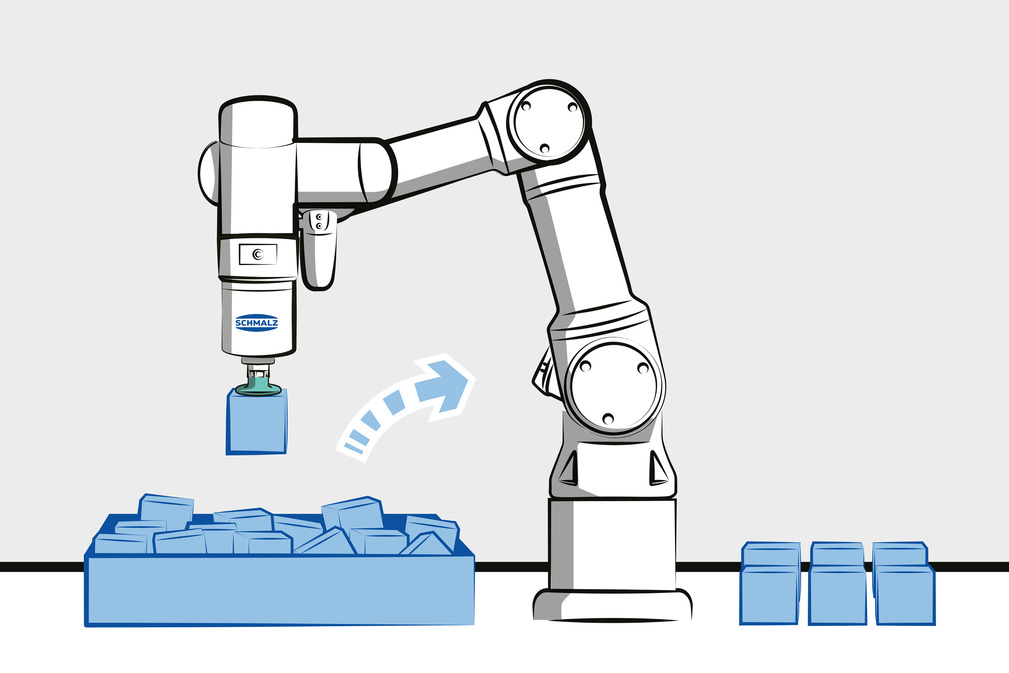
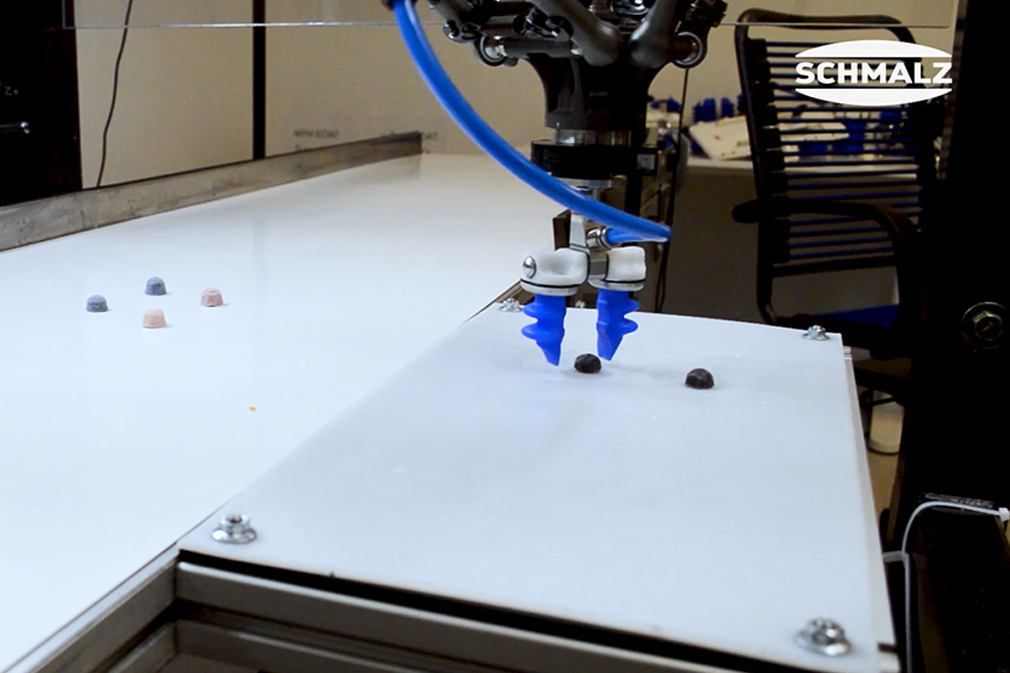
Une variante particulièrement exigeante est la "préparation de commandes". Dans ce cas, un système de caméras identifie le composant concerné, ce qui permet à l'EOAT de le retirer de manière autonome du bac. En combinaison avec un cobot, cela crée une solution flexible pour les processus automatisés de prélèvement et de placement.
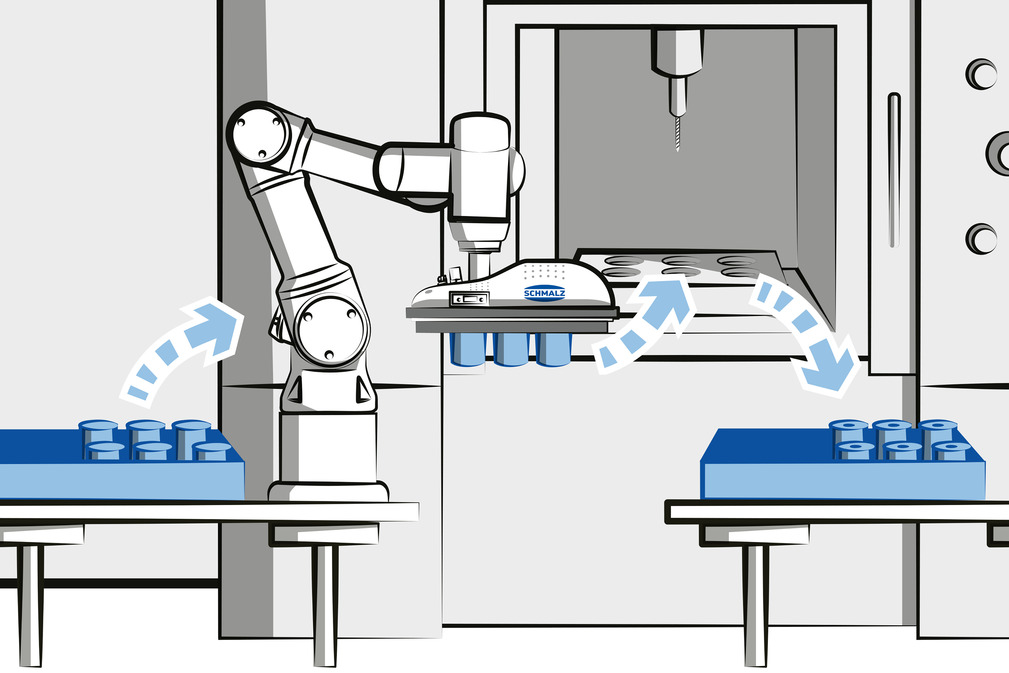
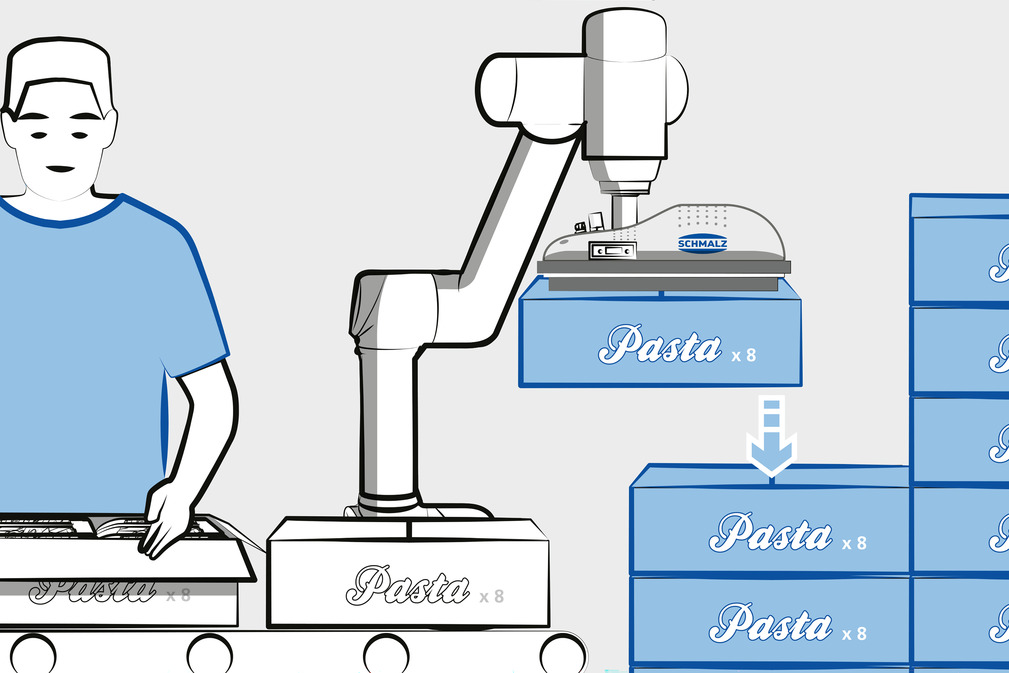
Les systèmes EOAT soulagent de manière optimale les employés qualifiés en automatisant les opérations monotones de chargement et de déchargement des machines. De plus, comme les cobots équipés d'EOAT sont disponibles en permanence et peuvent fonctionner jour et nuit, les temps d'inactivité des machines sont considérablement réduits. Dès que le traitement est terminé, l'EOAT décharge immédiatement la machine et la recharge avec de nouvelles pièces. Les cobots ne nécessitent pas beaucoup d'espace pour cela, et les opérateurs manuels peuvent toujours faire fonctionner les machines. Équipés de préhenseurs à vide, les systèmes EOAT offrent une flexibilité exceptionnelle et peuvent manipuler diverses pièces sur différentes machines.
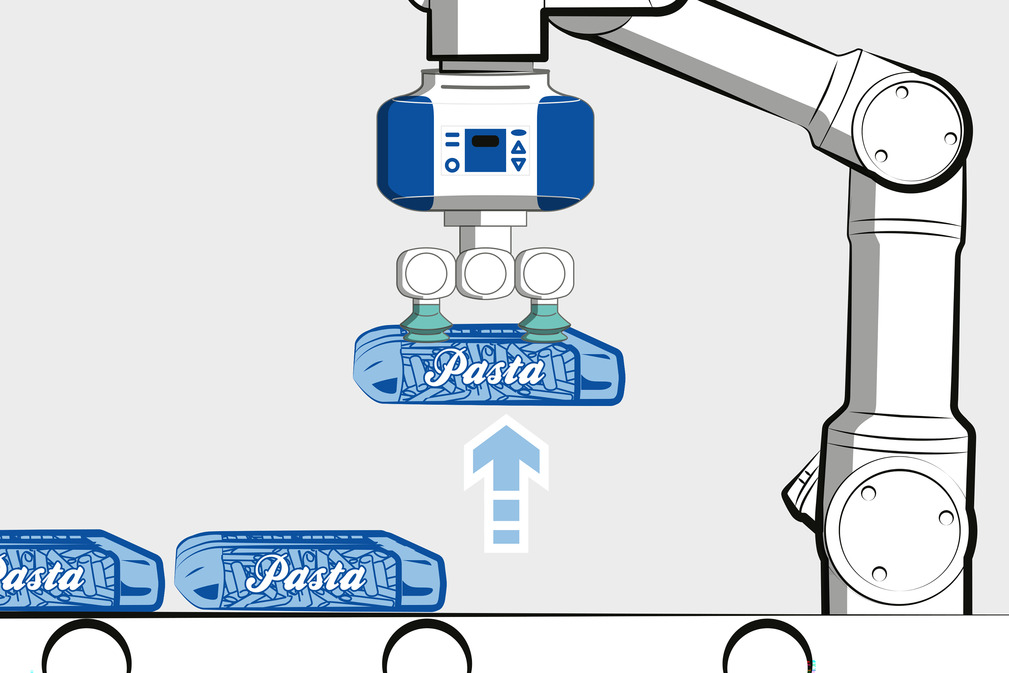
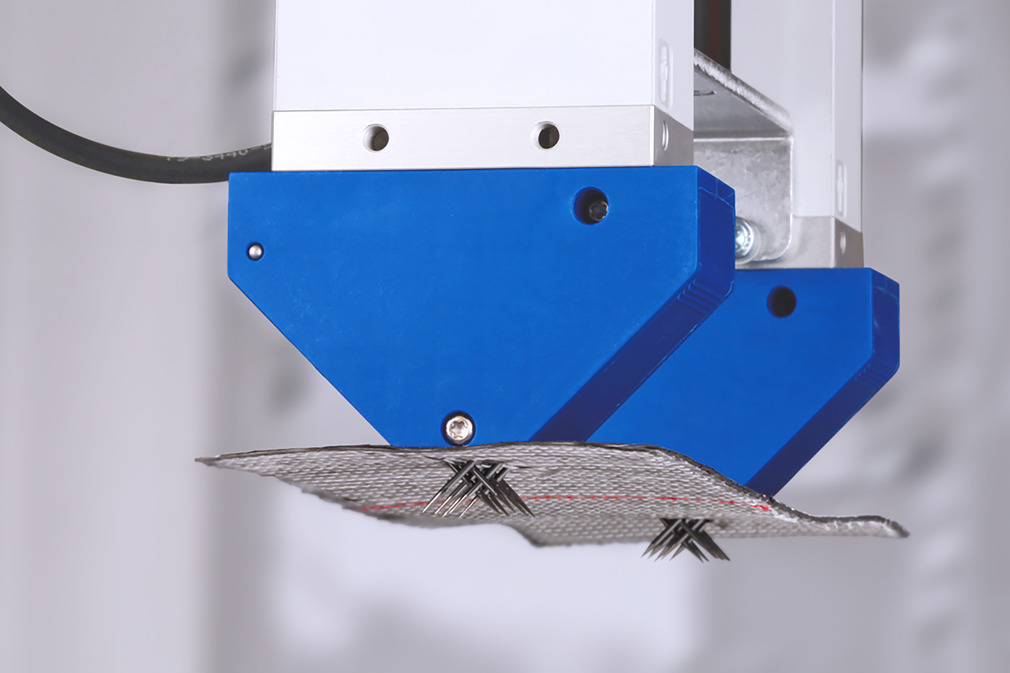
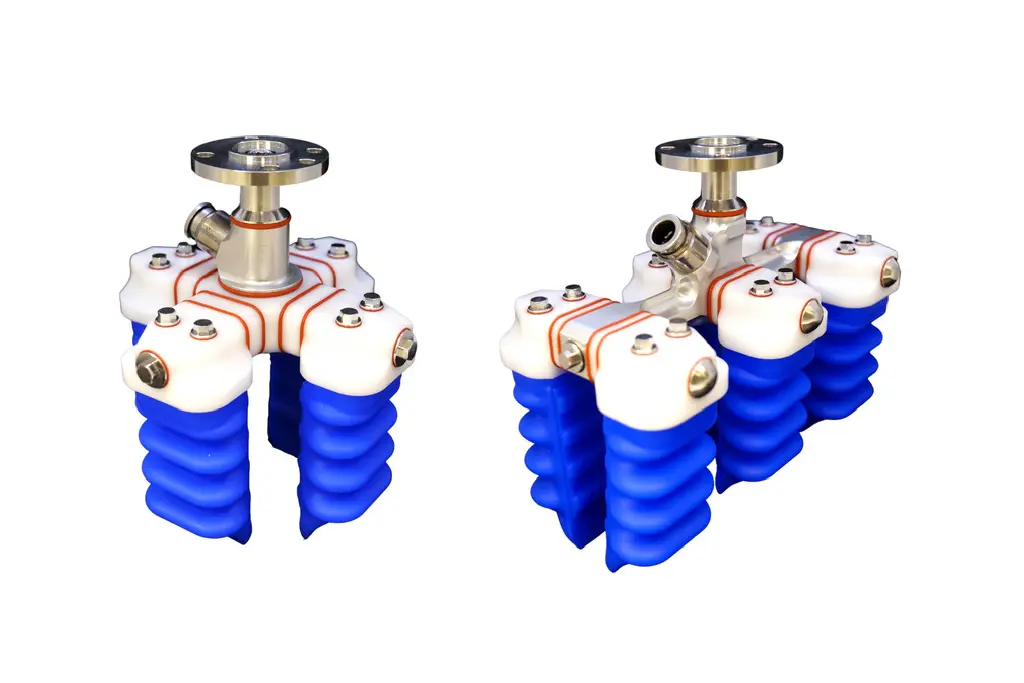
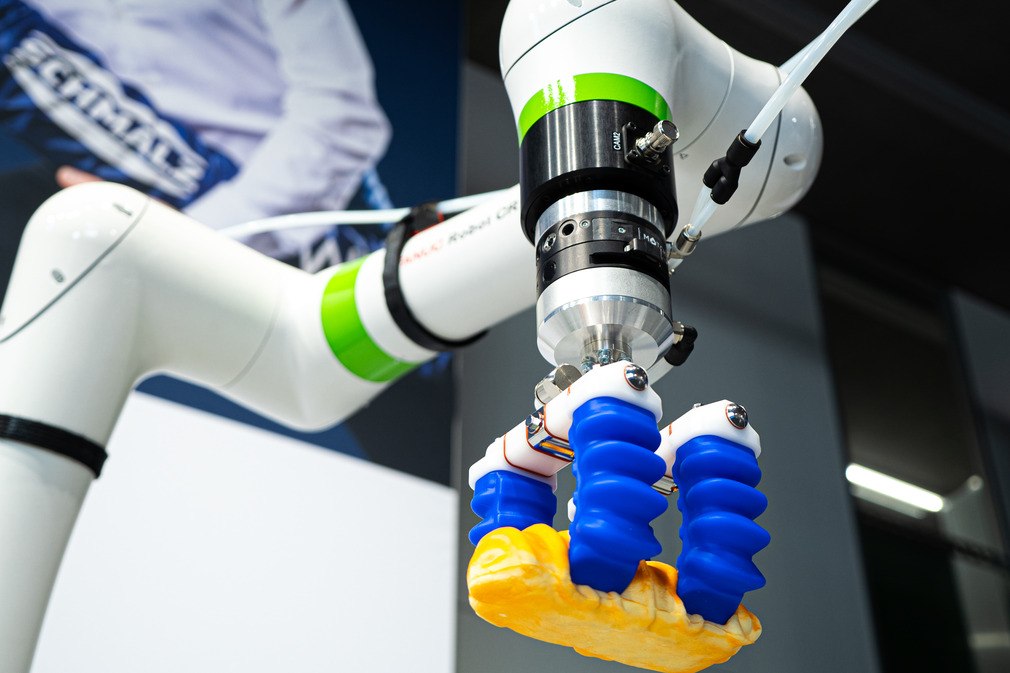
Le préhenseur vide déplace même les matières souples et délicates et les formes irrégulières en toute sécurité et en douceur. Une fois que la quantité de produits et la position cible correspondante ont été enregistrées, les pièces sont systématiquement placées jusqu'à ce que le carton soit plein. Les pièces emballées finies sont soigneusement empilées sur les palettes dans les positions spécifiées par les opérateurs.
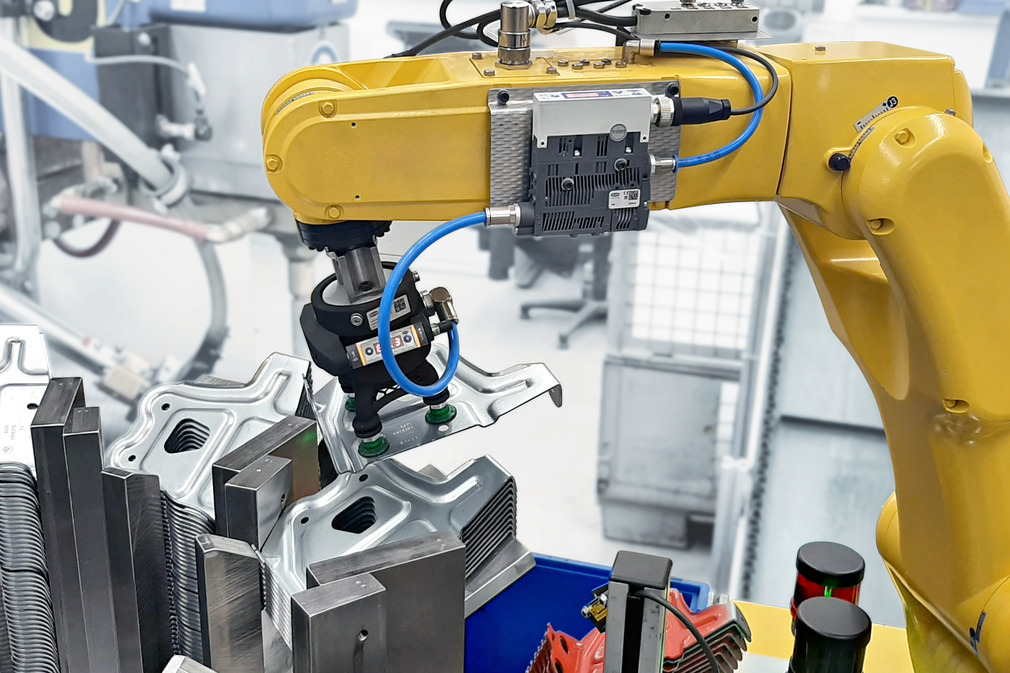
Le préhenseur à vide de l'EOAT manipule les pièces en minimisant les marques et les positionne précisément dans la position spécifiée pour les processus d'analyse ou de test. Les pièces sont inspectées ou traitées par la machine. Une fois le processus terminé, le cobot en est informé. Pendant les processus d'inspection, le cobot reçoit un signal indiquant si la pièce inspectée doit être transmise pour un traitement ultérieur ou triée.
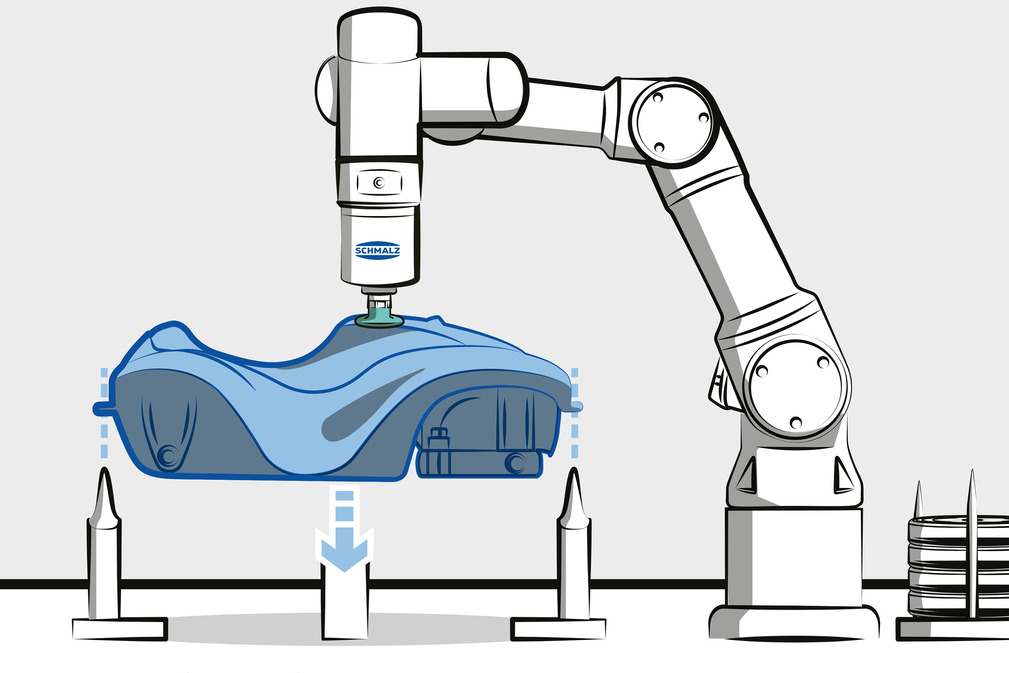
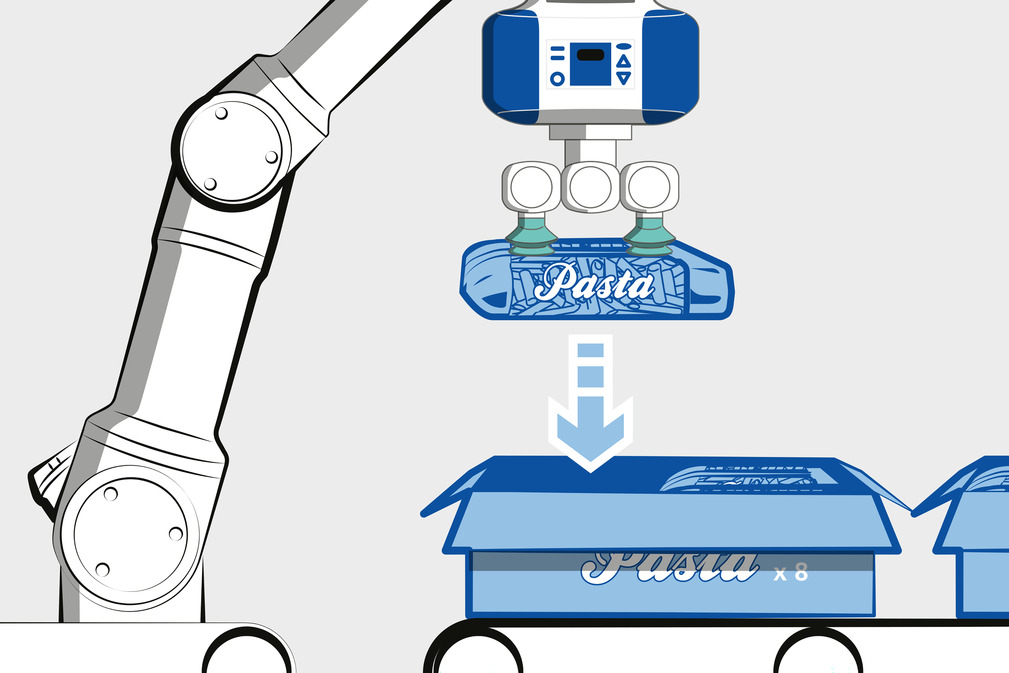
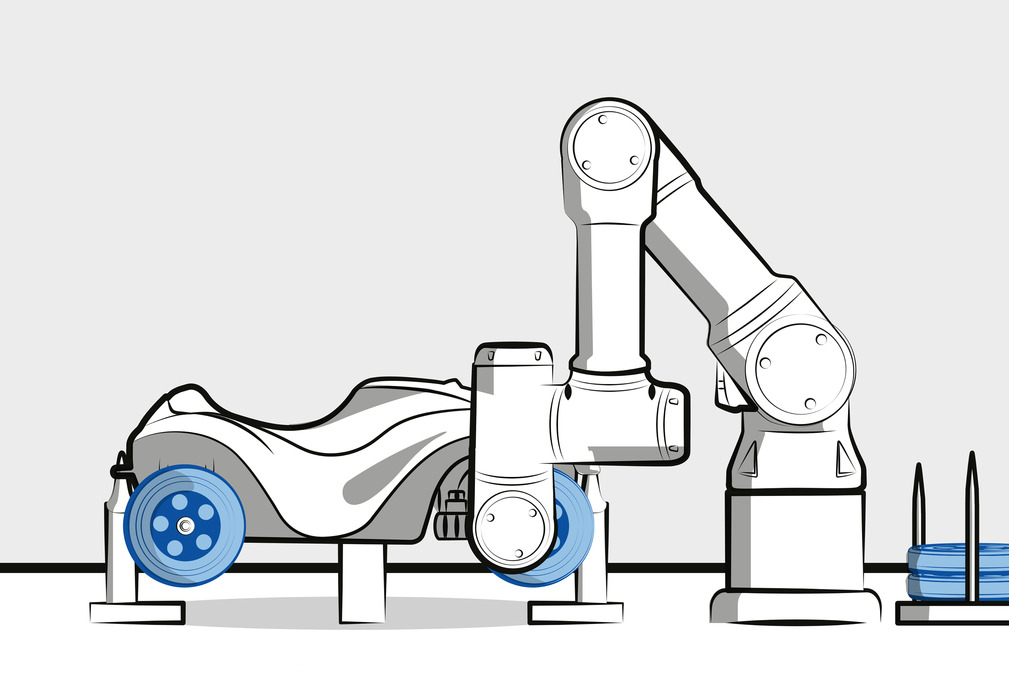
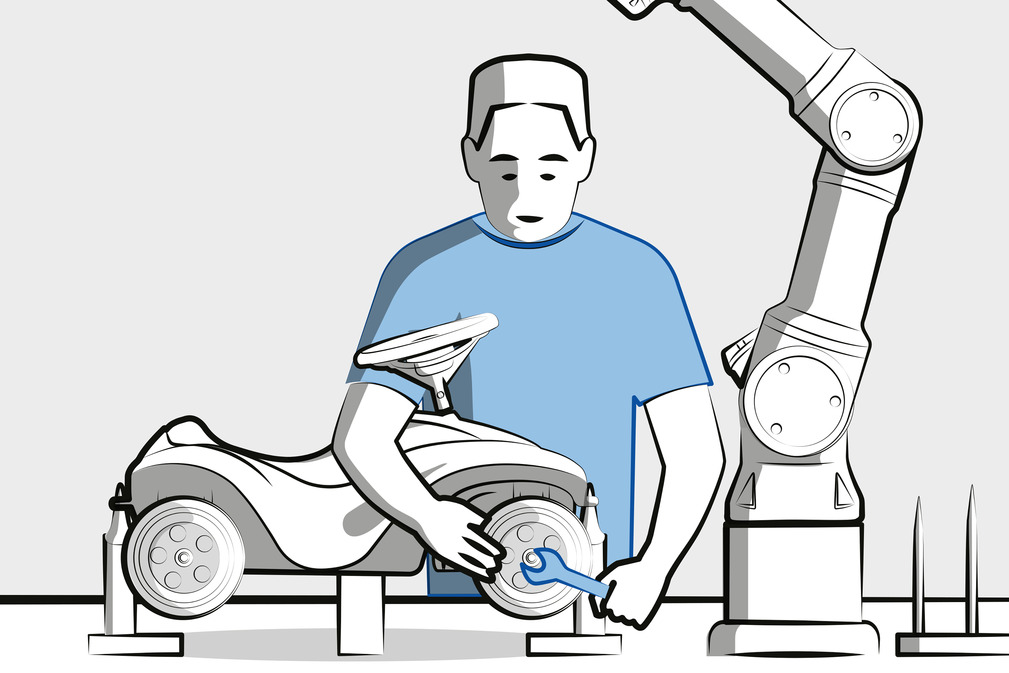
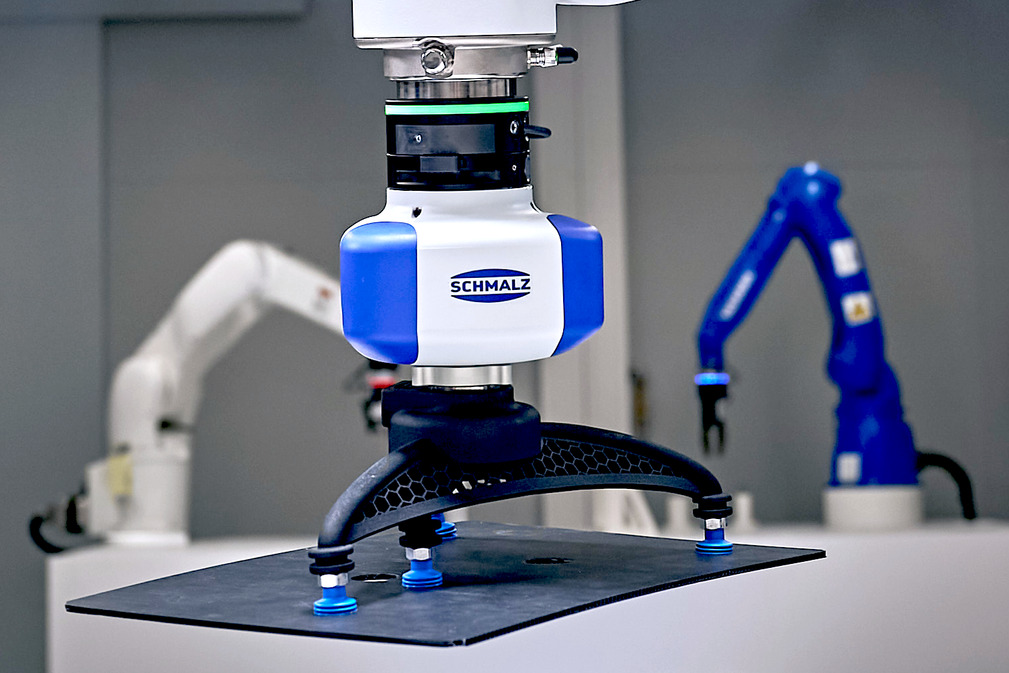
Le préhenseur à vide de l'EOAT saisit les pièces par le haut et les place de manière fiable dans la position souhaitée. Les différents composants sont saisis et assemblés les uns après les autres. Une fois enregistrées, les étapes de travail peuvent être répétées autant de fois que nécessaire. Sans séparation spatiale, les préhenseurs à vide prennent en charge les tâches monotones. Les humains surveillent, contrôlent et supervisent les processus.

Generatorstraat 34
7556 RC Hengelo












.jpg)