Herramienta End-of-Arm (EOAT)
Procesos seguros y eficientes en los sectores profesionales y la logística con EOAT de Schmalz
Procesos seguros y eficientes en los sectores profesionales y la logística con EOAT de Schmalz
Las herramientas End-of-Arm (EOAT) son herramientas especiales montadas en el extremo de brazos robóticos y otros sistemas de automatización que sujetan, mueven y posicionan piezas. Aumentan la productividad, reducen los costes del proceso y son componentes clave en las aplicaciones modernas de automatización y manipulación.
Los productos de Schmalz garantizan la máxima precisión, seguridad y control del proceso. Esto le permite implementar flujos de trabajo automatizados de forma eficiente y optimizarlos continuamente.
Schmalz desarrolla EOAT a medida en colaboración con fabricantes líderes de robots. Nuestros sets de manipulación listos para su conexión se adaptan a sus aplicaciones y procesos de producción y no sólo incluyen la garra, sino también la brida y los cables de conexión correspondientes.














Conocimientos del sector, casos de éxito y vídeos de aplicaciones para sus soluciones de automatización.
Ayudas para la selección, configuradores y la calculadora Schmalz para una planificación de procesos sencilla y eficiente.
Schmalz es sinónimo de proximidad al cliente, asessoramiento fiable y know-how.

Con EOAT, conectamos robots y piezas de trabajo, y creamos así la base de la productividad, la ergonomía y la rentabilidad en la automatización.∼ Dr. Maik Fiedler (Miembro del Consejo de Administración y Director de la unidad de negocios de automatización por vacío)
.jpg)
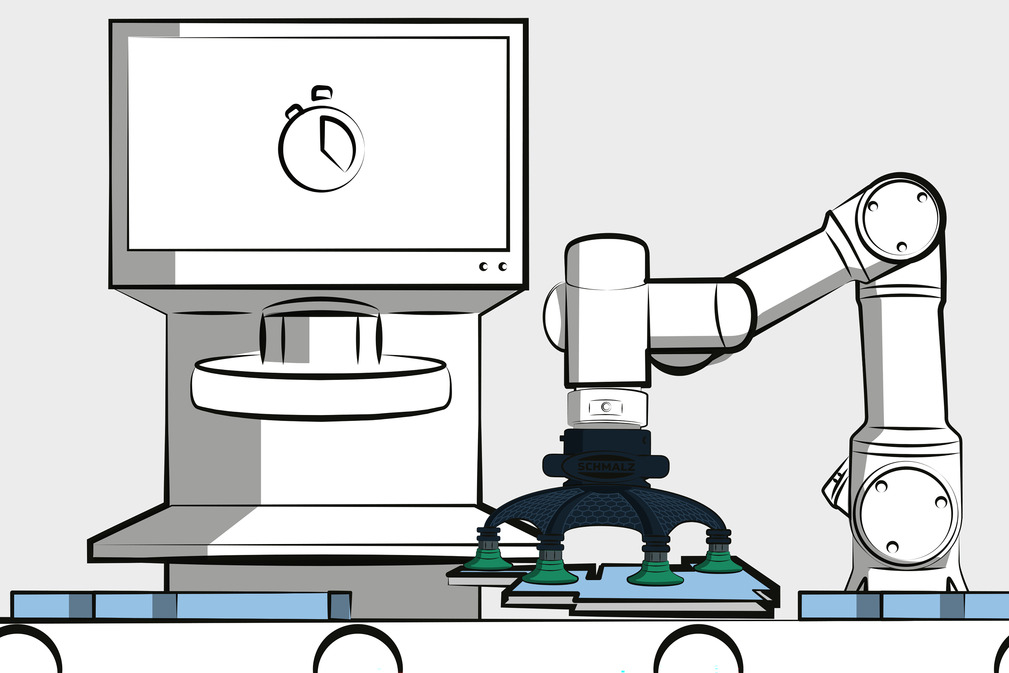
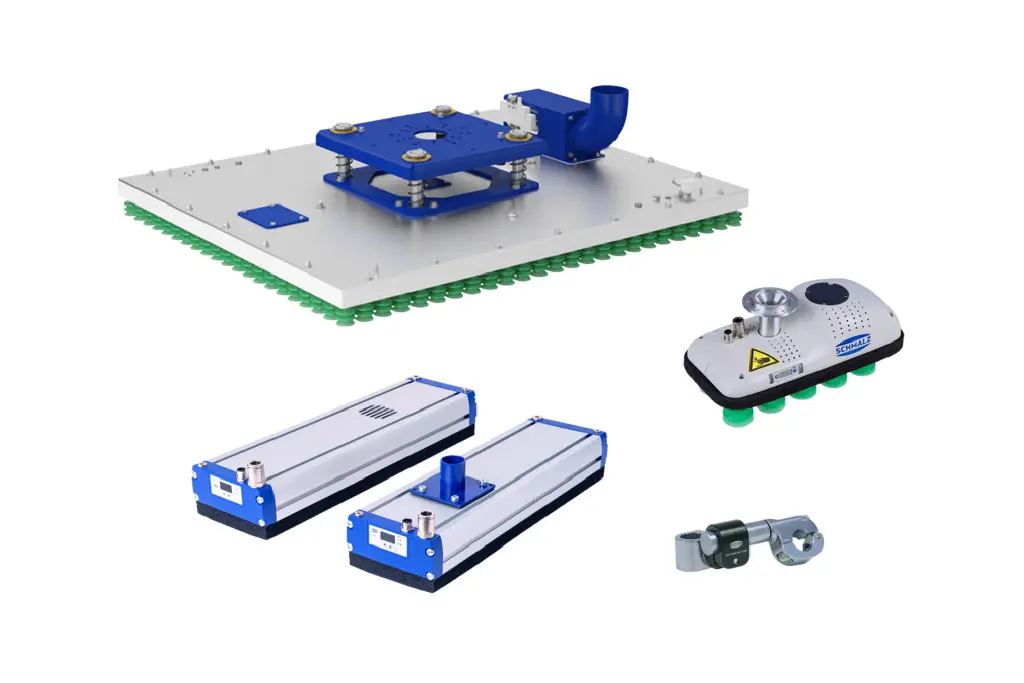
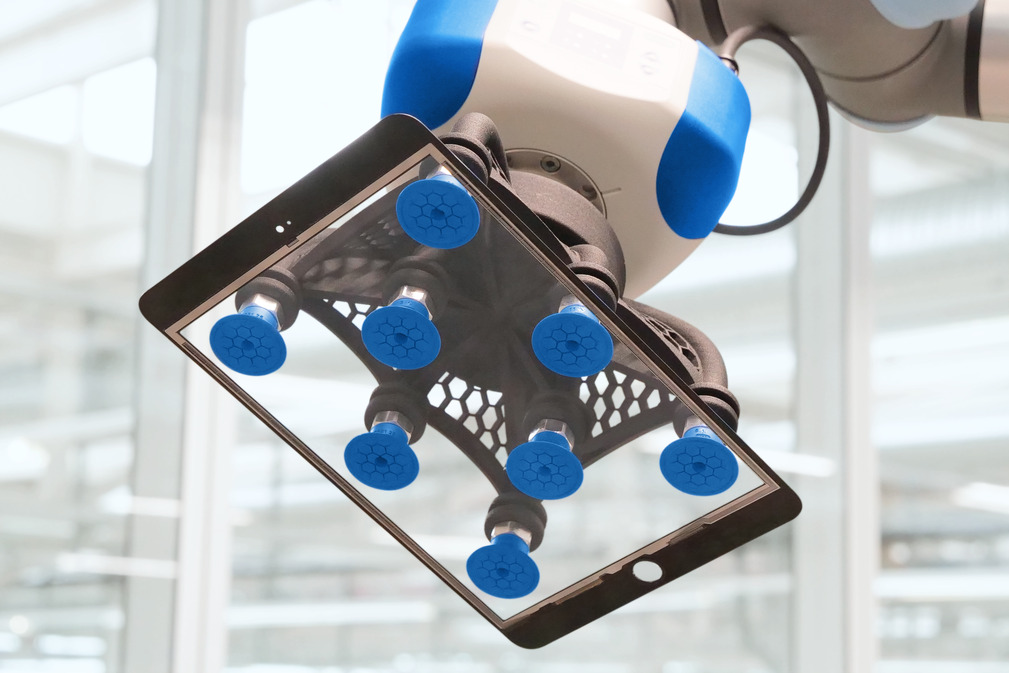
Un sistema EOAT consta de varios componentes que trabajan juntos para garantizar el handling de las piezas. El robot (1) sirve de base y realiza los movimientos. El robot está conectado al generador de vacío (3) a través de la brida (2) y genera el vacío necesario. Debajo se encuentra la garra de vacío (4), que aquí se muestra a modo de ejemplo con ventosas que recogen con seguridad la pieza (5). El sistema se controla mediante un panel de operador (6), mientras que el software (app) (7) se utiliza para programar y ajustar el sistema.
Descubra vídeos prácticos que muestran sistemas de ventosas de Schmalz en acción. Nuestras soluciones EOAT utilizan aplicaciones reales para demostrar cómo puede automatizar sus aplicaciones de forma eficiente y manipular una gran variedad de piezas de forma segura.

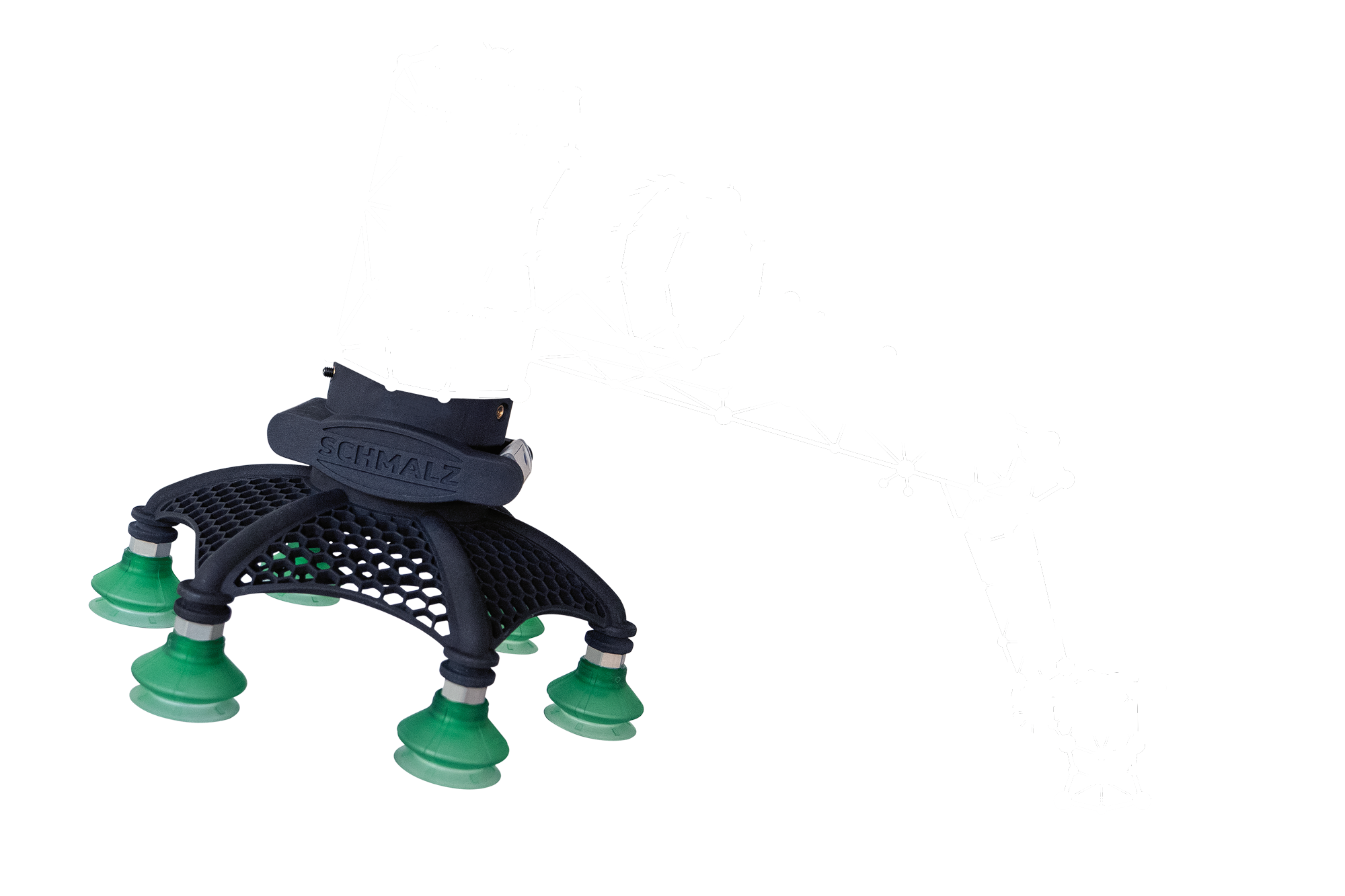
La flexibilidad de las soluciones EOAT es crucial para las empresas que necesitan responder a exigencias de producción cambiantes. Las garras de vacío no se limitan a una única actividad, sino que pueden adaptarse de muchas maneras a diferentes aplicaciones y piezas de trabajo variables.
Tanto si desea manipular piezas con vacío, magnéticamente o mecánicamente: Schmalz le ofrece componentes individuales, sets listos para su conexión y sistemas de ventosas completos para su aplicación.
Nuestras soluciones modulares pueden integrarse rápidamente en sistemas existentes y son escalables para diferentes tamaños de lote. Desde la selección hasta la puesta en marcha, le apoyamos con asessoramiento técnico y pruebas prácticas de función para garantizar que su proceso funcione de forma fiable.














Cada segundo cuenta
El fabricante de puertas PRÜM reestructuró su cadena de procesos para optimizar los procesos en la fábrica. También se puso a prueba la carga y descarga de la máquina de procesamiento. Junto con el especialista en vacío Schmalz, la empresa encontró una solución que no sólo aceleró el proceso, sino que también redujo notablemente los costes energéticos.
Nuevo
Potencia eléctrica: El vacío se hace móvil
Las fábricas modulares, la robótica móvil y el aumento de los precios de la energía están cambiando radicalmente la automatización. En cada vez más casos, esto está abriendo una alternativa a los sistemas tradicionales de aire comprimido: la generación eléctrica de vacío, que ofrece nuevos grados de libertad. Permite soluciones de agarre autosuficientes, reduce las pérdidas de energía y se integra perfectamente en los entornos de fabricación digital.
EOAT es la clave para una automatización flexible
El Dr. Maik Fiedler es miembro de la dirección de la empresa y director de la unidad de negocio automatización por vacío de Schmalz. En esta entrevista explica la importancia estratégica del End-of-Arm Tooling (EOAT) para la automatización y describe cómo Schmalz diseña la conexión entre el robot y la pieza.

La herramienta End-of-Arm (EOAT) de Schmalz permite la realización precisa y segura de soluciones de automatización inteligentes. La combinación de componentes de vacío y sistemas de ventosas específicos crea sistemas completos altamente eficientes que ofrecen la máxima flexibilidad en diversas aplicaciones. Apostamos por una tecnología del vacío potente y de fácil manejo que le ofrece numerosas ventajas:
Las soluciones de robótica de Schmalz se utilizan para máquinas de carga y descarga, para procesos de picking, paletizado y despaletizado o bin picking. La gama incluye efectores finales estandarizados y configurables, sistemas modulares de garras, sets de visión y manipulación, así como generadores de vacío eléctricos y neumáticos.
Nuestras soluciones de garra son compatibles con todos los robots ligeros y cobots habituales y se suministran como conjuntos listos para su conexión. Equipada con interfaces de comunicación para el intercambio bidireccional de datos, con funciones de diagnóstico para el proceso de handling, con sistemas de visión para la detección de puntos de agarre o ecosistemas para el cambio automatizado de garras, la garra desempeña un papel central en el conjunto del sistema.
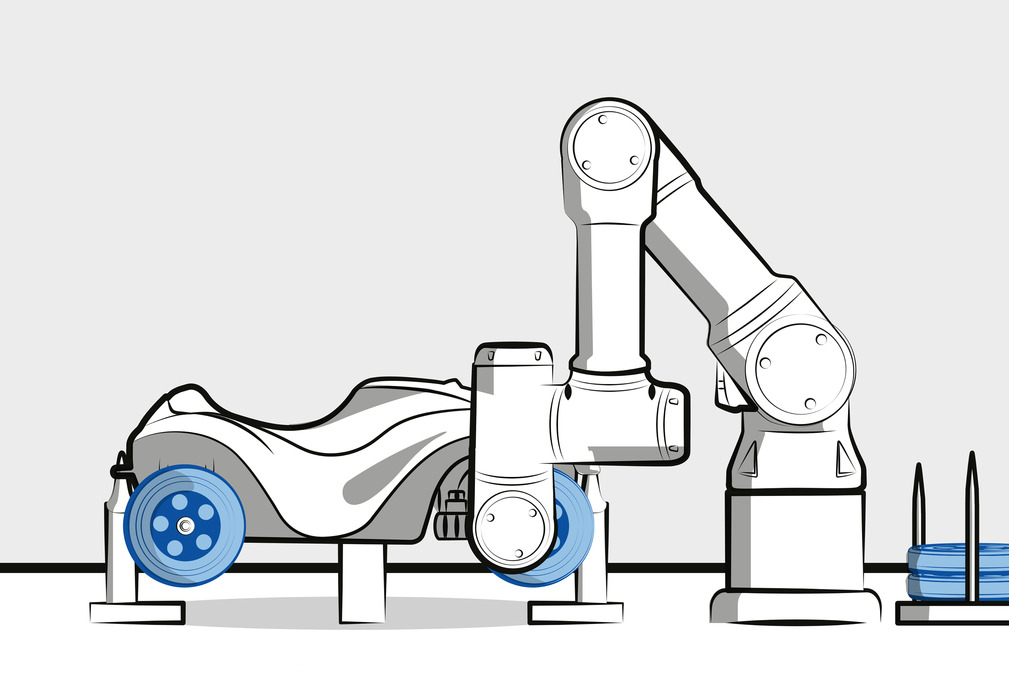
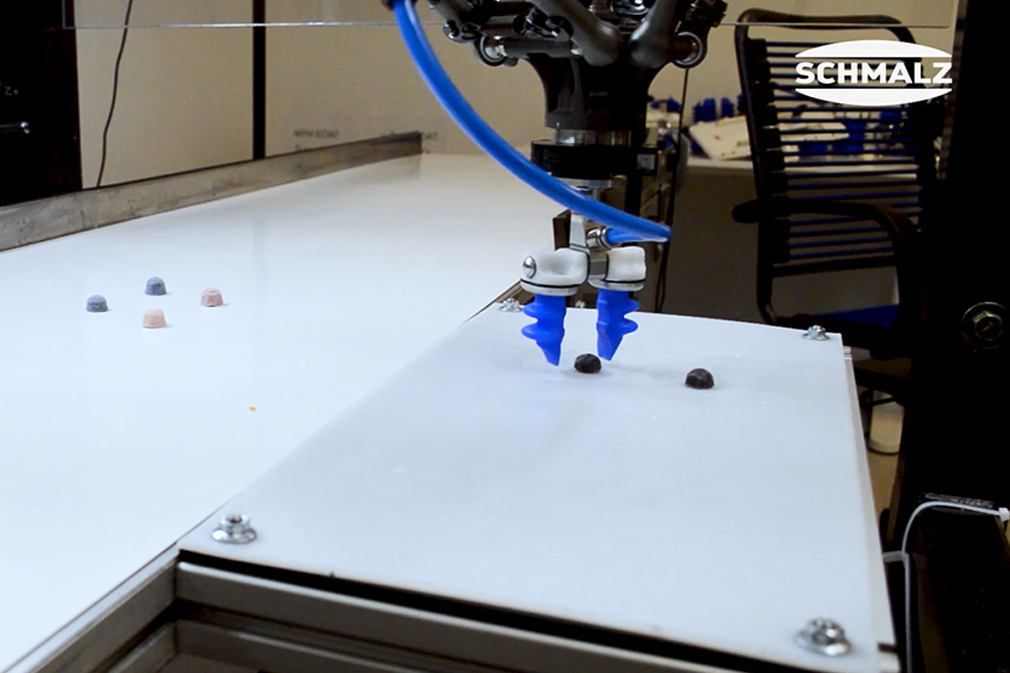
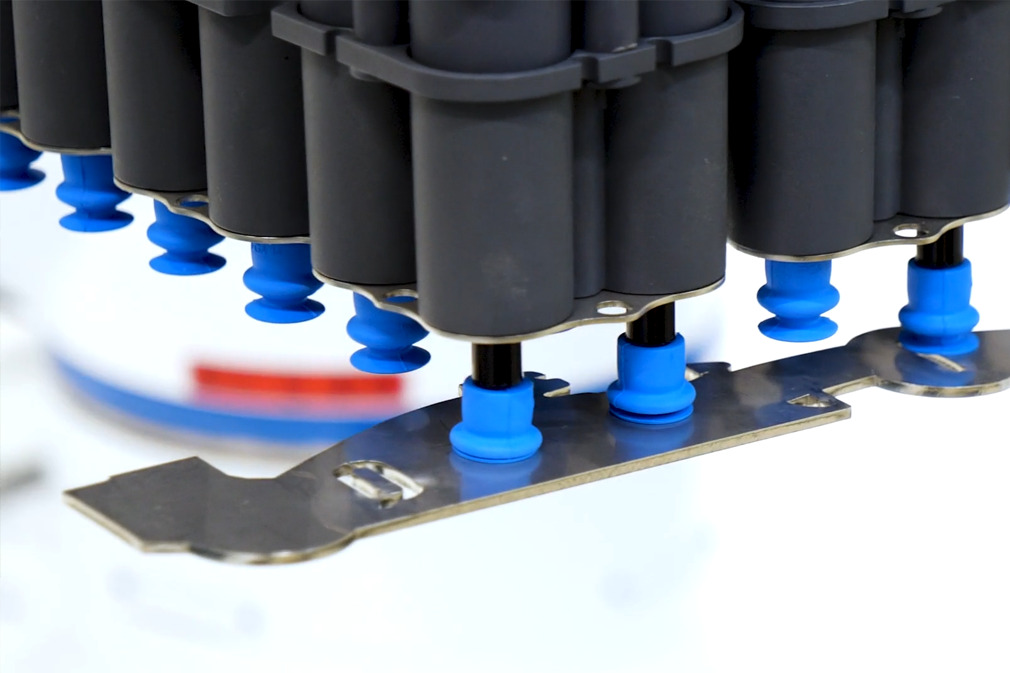
En esta aplicación de handling, el EOAT se encarga de recoger y colocar las piezas. Las recoge de una delegación definida y las coloca en otra posición igualmente definida.
Gracias a su gran precisión y exactitud de repetición, el EOAT puede realizar estas tareas de forma fiable las 24 horas del día. Las tareas recurrentes pueden programarse, guardarse y recuperarse fácilmente en cualquier momento.
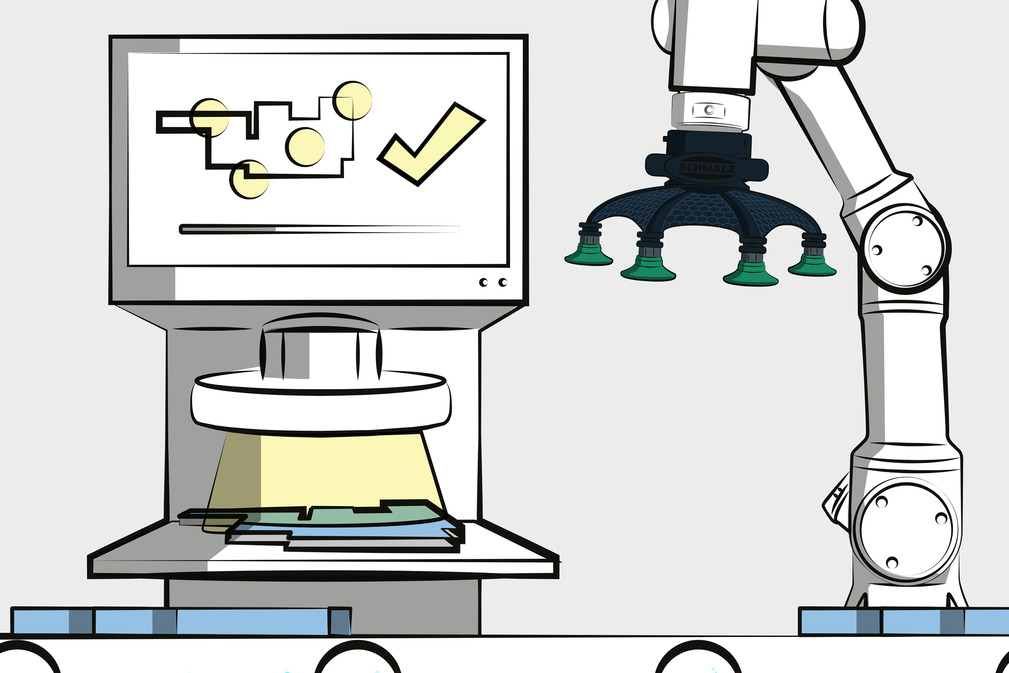
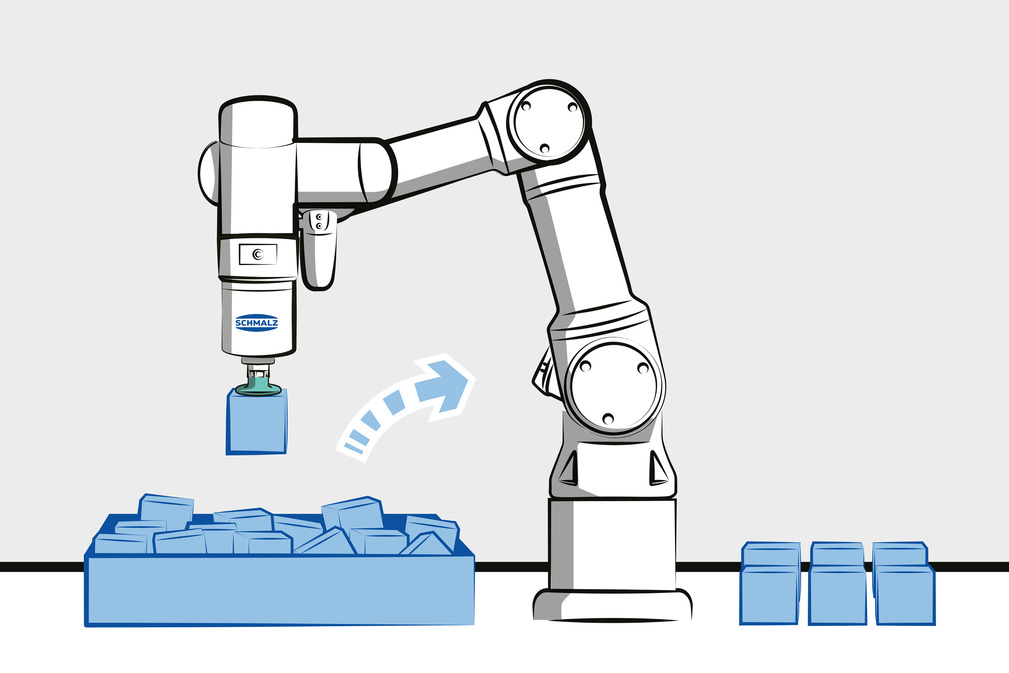
Una variante especialmente exigente es la denominada "bin picking". En este caso, un sistema de cámaras identifica el componente correspondiente y permite al EOAT extraerlo del contenedor de forma independiente. En combinación con un cobot, se crea una solución flexible para procesos automatizados de recoger y colocar.
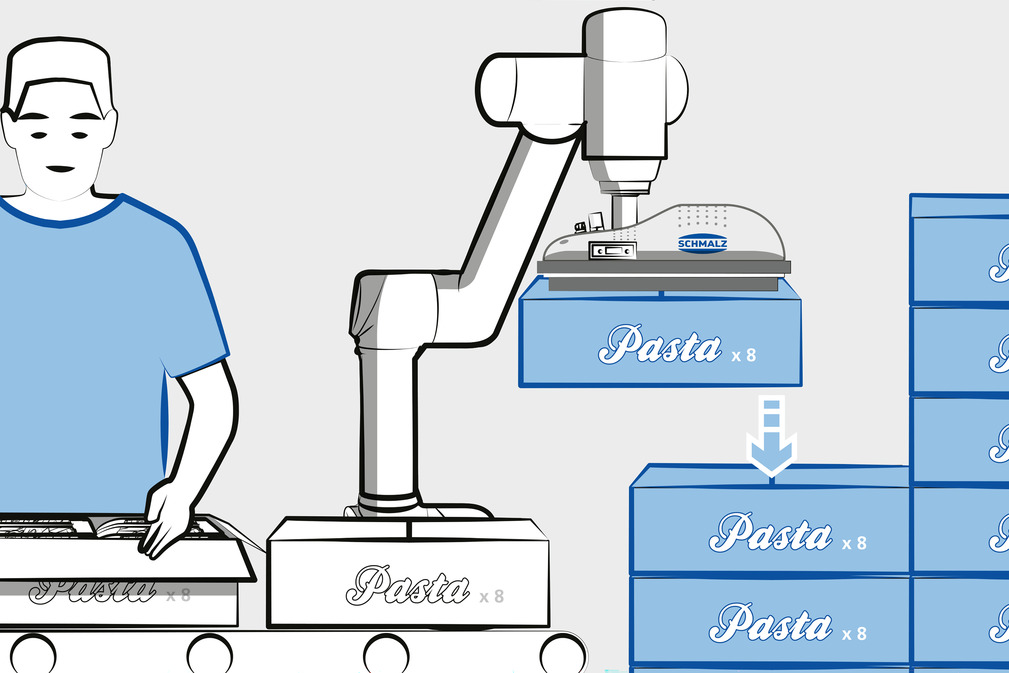
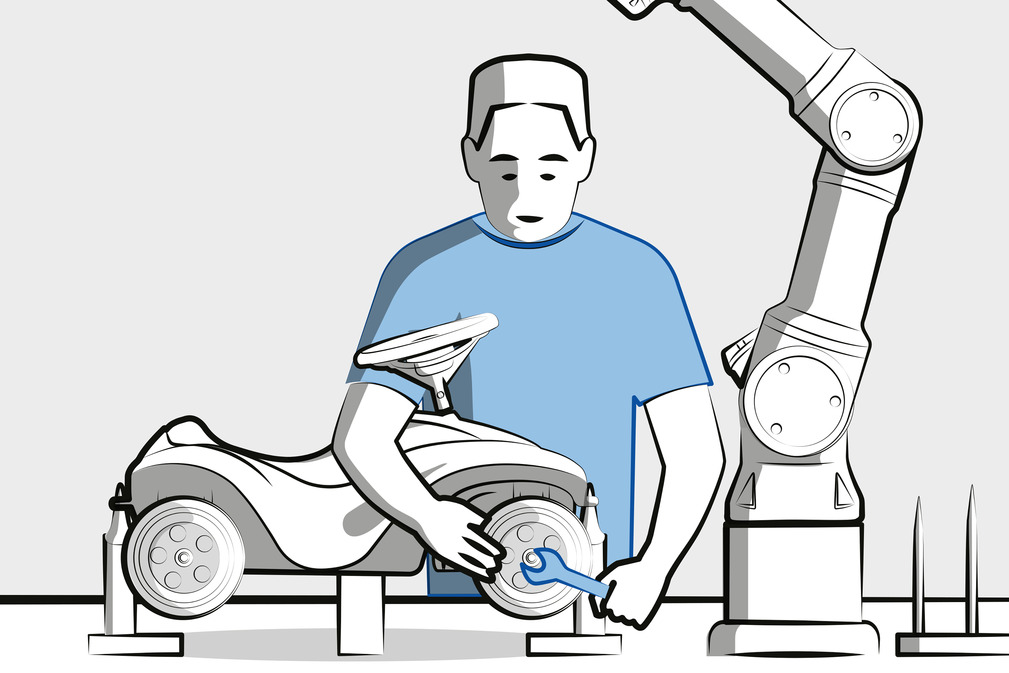
Los sistemas EOAT proporcionan un alivio óptimo a los empleados cualificados al automatizar la monótona carga y descarga de las máquinas. Además, como los cobots con EOAT están siempre disponibles y pueden funcionar día y noche, los tiempos de inactividad de las máquinas se reducen considerablemente. En cuanto termina el proceso, el EOAT descarga inmediatamente la máquina y la vuelve a cargar con piezas nuevas. Los robots no necesitan mucho espacio para ello, y los operadores manuales pueden seguir haciendo funcionar las máquinas. Equipados con garras de vacío, los sistemas EOAT ofrecen una flexibilidad excepcional y pueden manipular varias piezas en distintas máquinas.
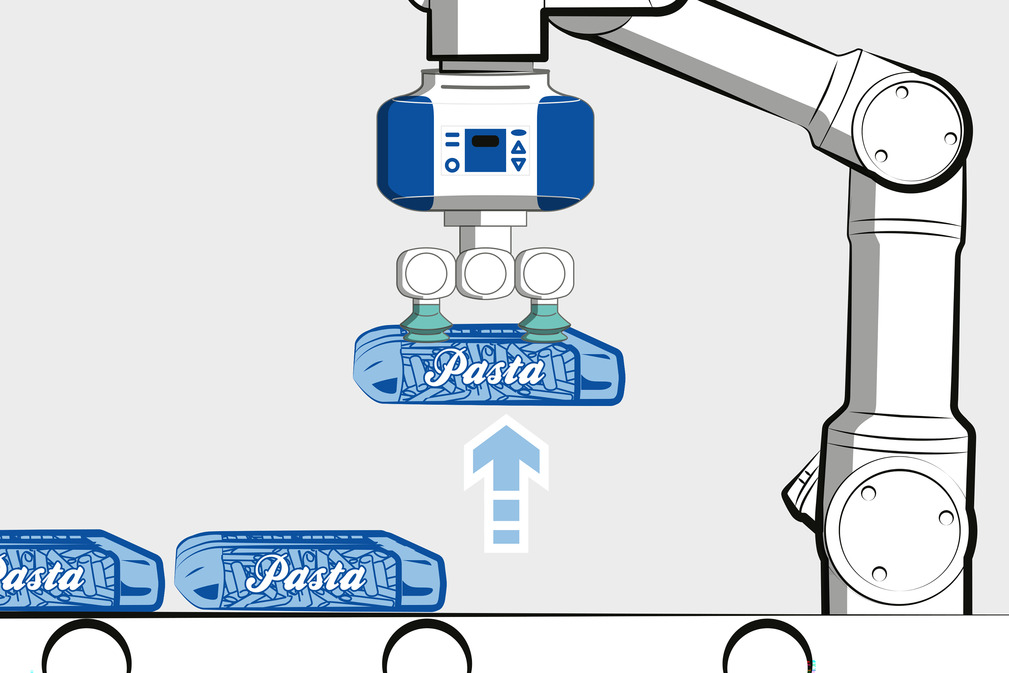
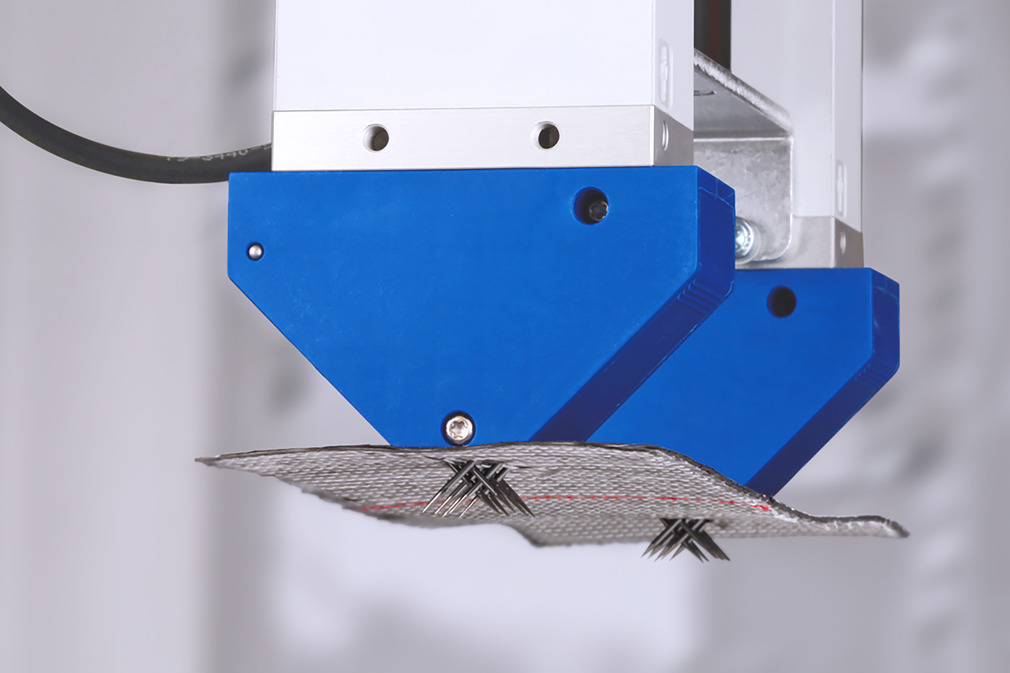
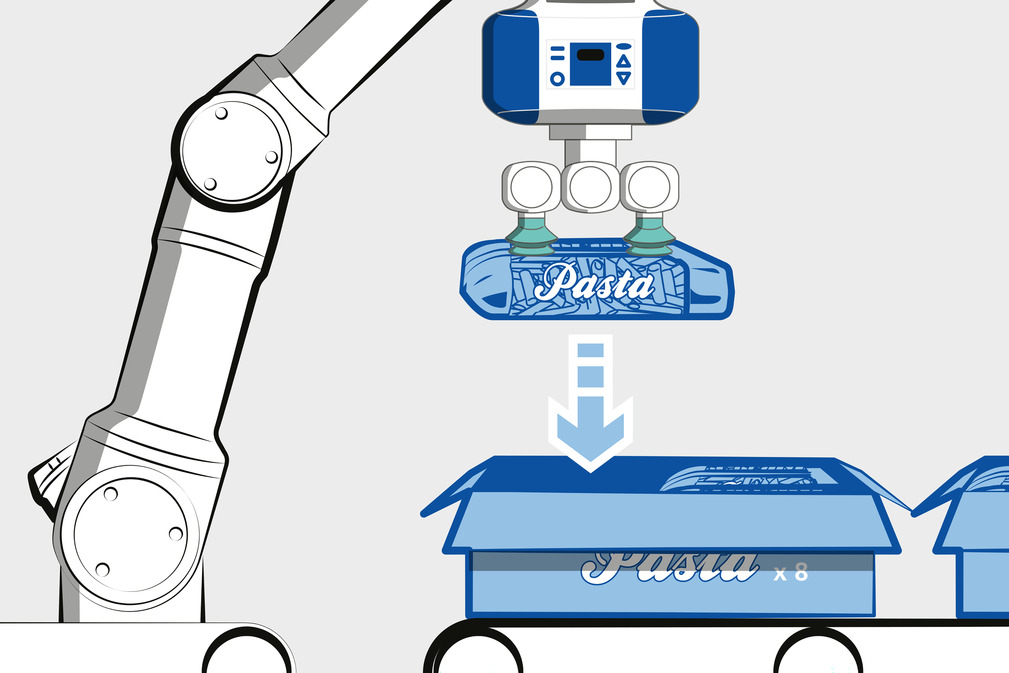
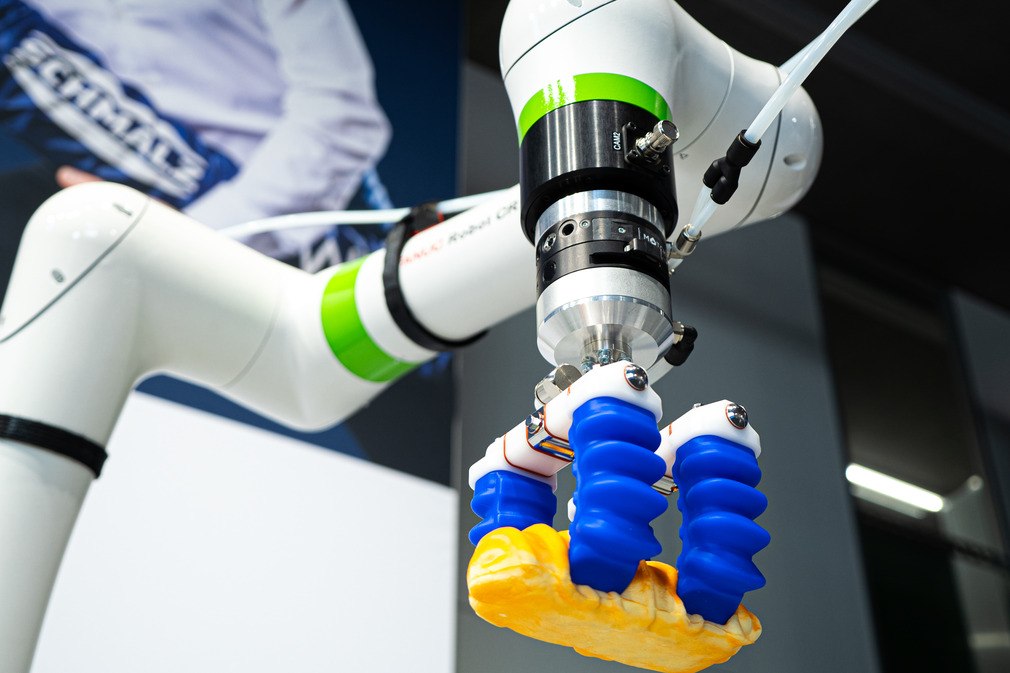
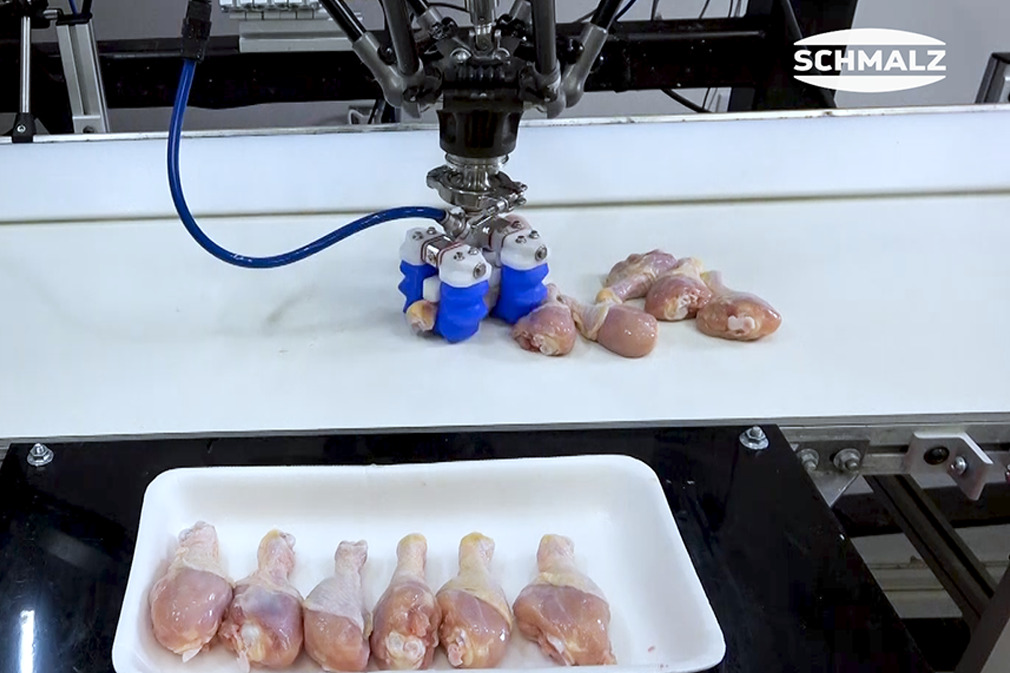
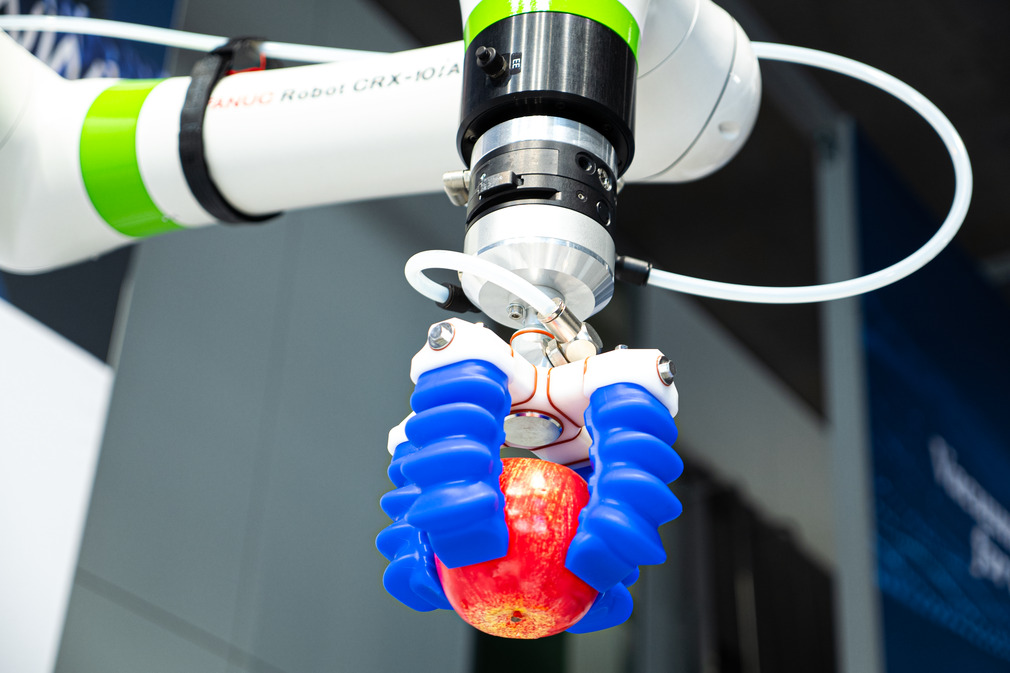
La garra de vacío mueve con seguridad y suavidad incluso materiales blandos y delicados y formas irregulares. Una vez guardada la cantidad de producto y la posición de destino correspondiente, las piezas se colocan sistemáticamente hasta llenar la caja de cartón. Las piezas envasadas terminadas se apilan ordenadamente en los palets en las posiciones especificadas por el hombre.
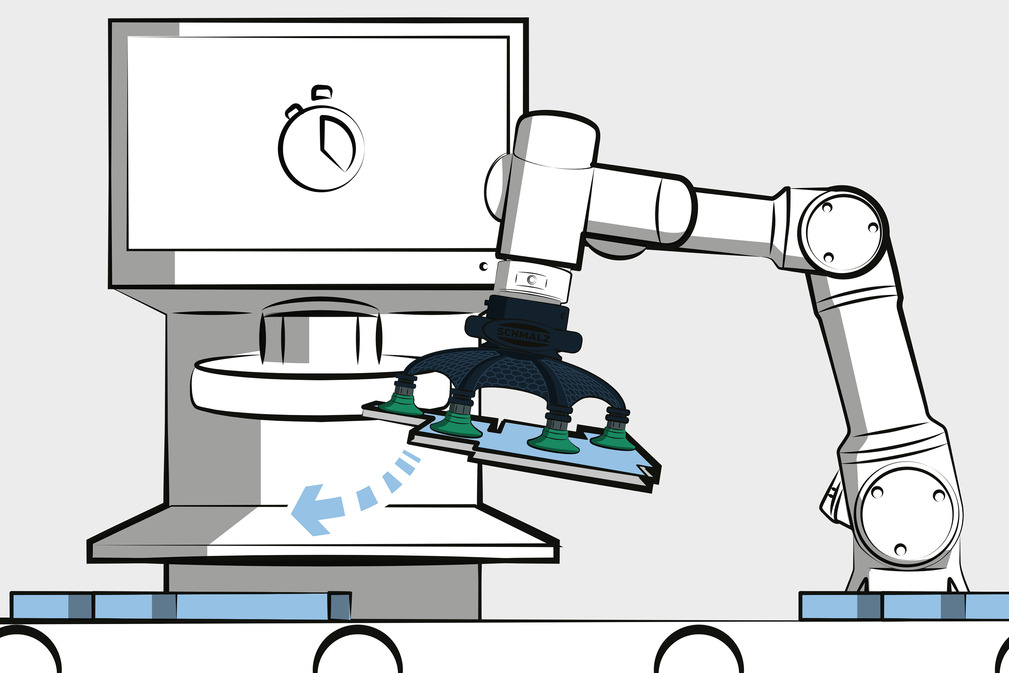
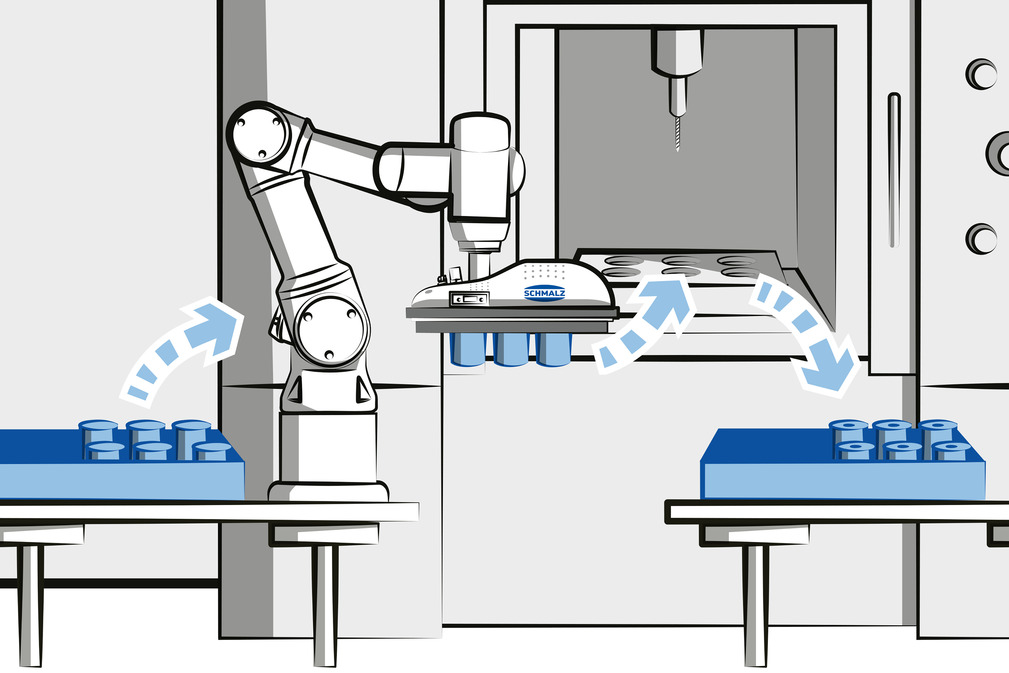
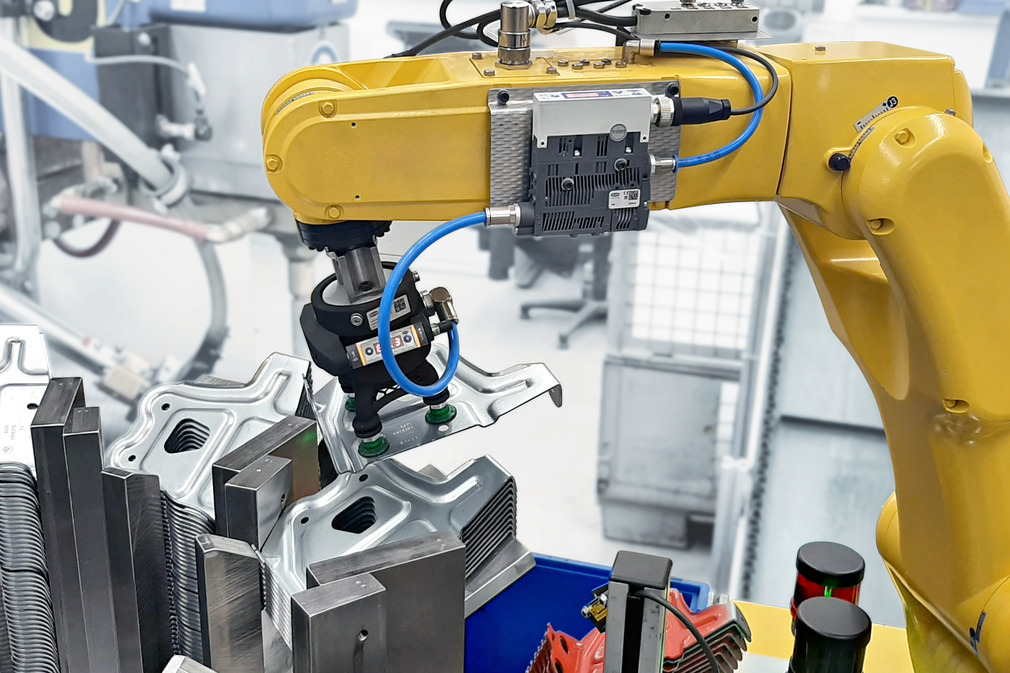
La garra de vacío de la EOAT manipula las piezas con marcas minimizadas y las coloca con precisión en la posición especificada para los procesos de análisis o ensayo. La máquina inspecciona o procesa las piezas. Una vez finalizado el proceso, se informa al cobot. Durante los procesos de inspección, el cobot recibe una señal que indica si la pieza inspeccionada debe enviarse para su posterior procesamiento o clasificarse.
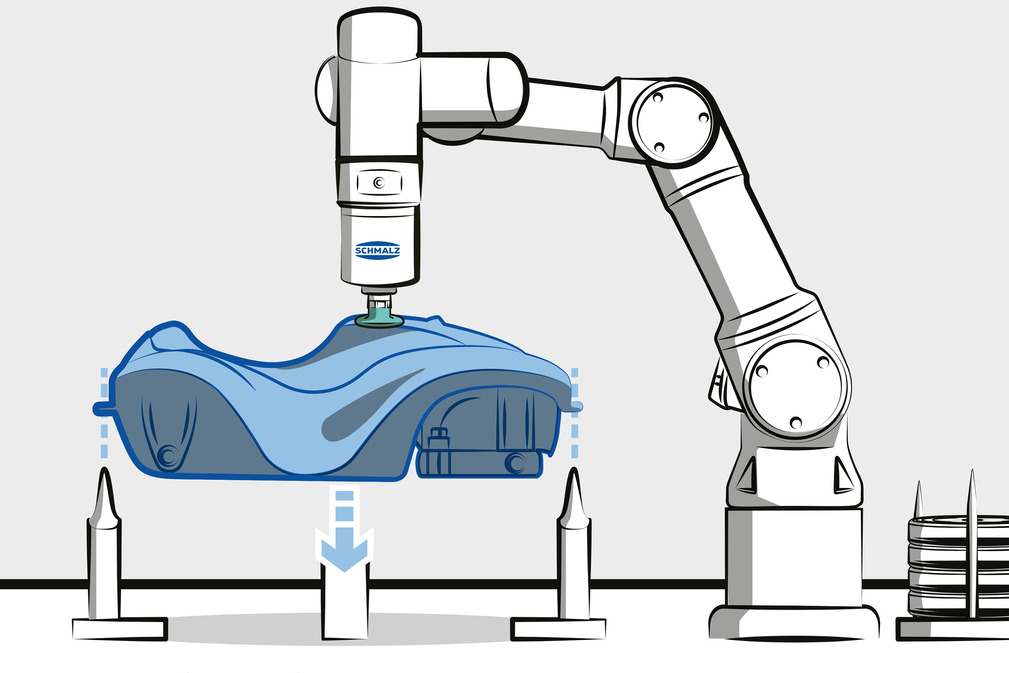
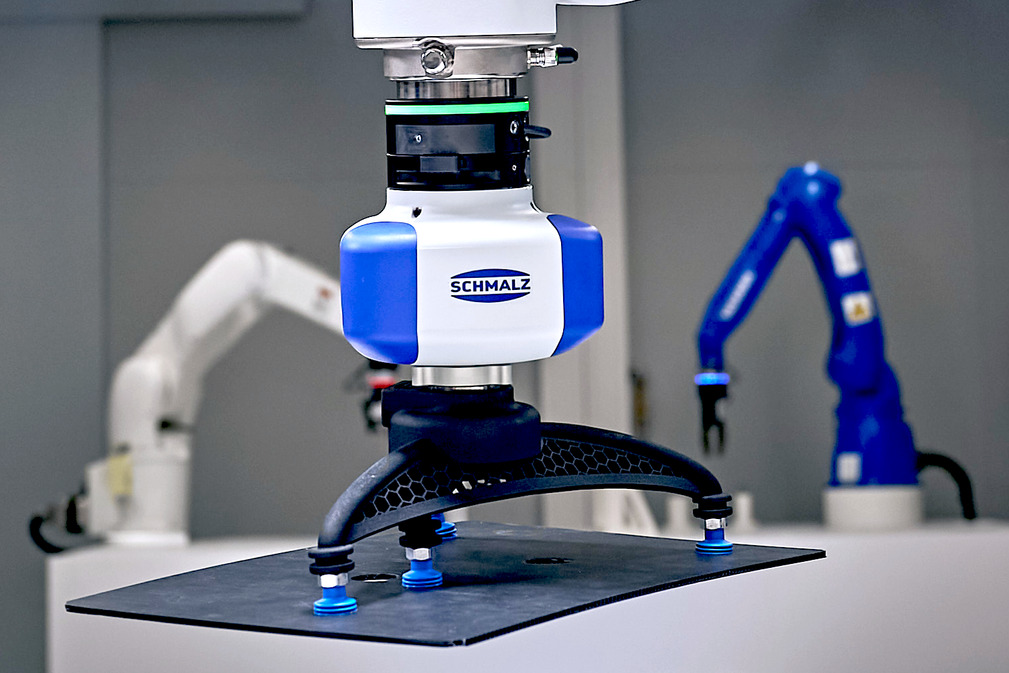
La garra de vacío del EOAT recoge las piezas desde arriba y las coloca de forma fiable en la posición deseada. Los componentes individuales se agarran y ensamblan uno tras otro. Una vez guardados, los pasos de trabajo pueden repetirse tantas veces como sea necesario. Sin separación espacial, las garras de vacío se encargan de tareas monótonas. Las personas vigilan, controlan y supervisan los procesos.

Avda. Ribera de Axpe. 49
P.A.E. UDONDO-Edificio B-Nave 2
48950 Erandio (Vizcaya)












.jpg)