
Bin Picking
Bin Picking bezeichnet einen automatisierten Prozess in der Fertigung und Logistik, bei dem Roboter Werkstücke aus einem Behälter (dem sogenannten "Bin") entnehmen.
Diese Technologie wird vor allem in der Industrie eingesetzt, um die Effizienz der Produktion zu steigern, indem sie die manuelle Entnahme von Einzelteilen ersetzt und so Zeit und Kosten spart.
Das automatisierte Verfahren findet auch Anwendung im Pick-and-Pack-Prozess, der für die schnelle und präzise Auswahl und Verpackung von Produkten unerlässlich ist. Durch den Einsatz moderner Robotik in Kombination mit Robot Vision können diese Systeme sogar WErkstücke erkennen, die schwer zu greifen sind, was die Flexibilität bei der Handhabung unterschiedlicher Werkstücke deutlich erhöht.
Funktionsweise von Bin Picking Systeme
Beim Bin Picking nutzt ein Roboter eine Kombination aus Bildverarbeitung, Sensoren, künstlicher Intelligenz und einem Greifer, um die Objekte im Behälter zu identifizieren und zu greifen.

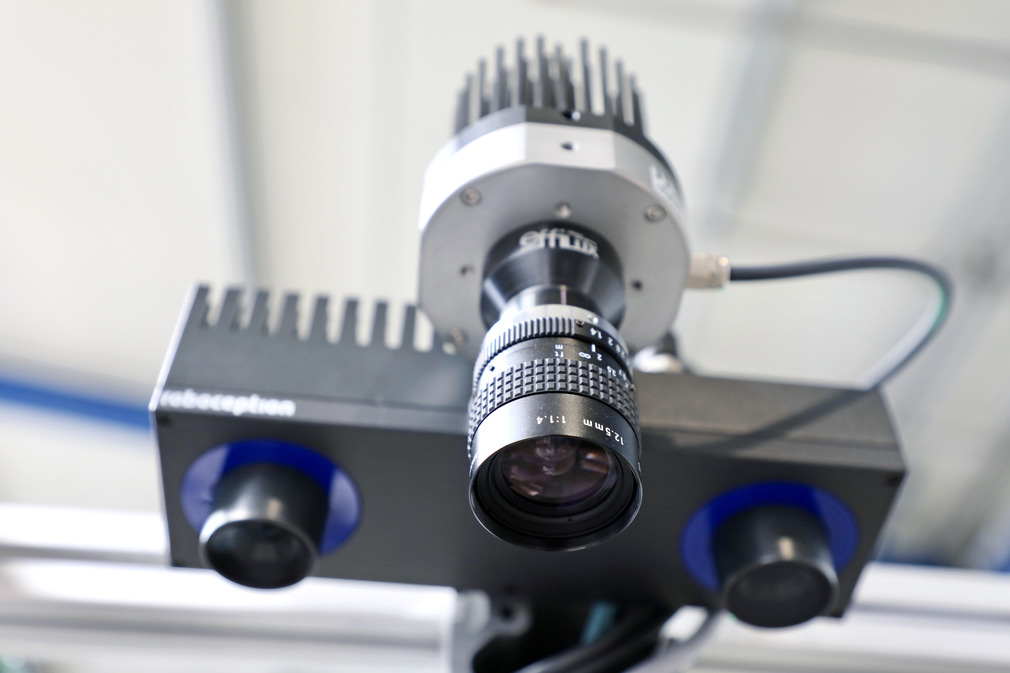
Erkennung und Lokalisierung der Werkstücke
Die erste Phase eines Bin Picking-Systems beginnt mit der präzisen Erkennung der Objekte im Behälter. Hierfür kommen hochentwickelte Bildverarbeitungssysteme sowie 3D-Kameras zum Einsatz, die eine detaillierte Analyse des Behälters ermöglichen. Diese Technologien scannen die Werkstücke im Bin und erstellen eine 3D-Punktewolke, die als Grundlage für die weitere Verarbeitung dient.
Mithilfe der erzeugten Modellinformationen berechnet das System den optimalen Griff in die Kiste, sodass der Roboter das gewünschte Werkstück exakt entnehmen kann, ohne unbeabsichtigt andere Objekte zu verschieben oder zu beschädigen.
Ein entscheidender Vorteil dieser Phase ist der Einsatz von Künstlicher Intelligenz (KI) und maschinellem Lernen. Diese Technologien ermöglichen es dem Roboter, die genaue Position jedes Werkstücks selbst in unübersichtlichen Anordnungen zu ermitteln.
Durch die kontinuierliche Verbesserung des Systems kann der Roboter auch mit komplexen und chaotischen Behältern effizient umgehen. Dies reduziert nicht nur die Verschattung (das Problem, bei dem Werkstücke aufgrund ihrer Position oder Orientierung nicht erfasst werden), sondern sorgt auch dafür, dass jedes Werkstück präzise identifiziert und korrekt entnommen wird.

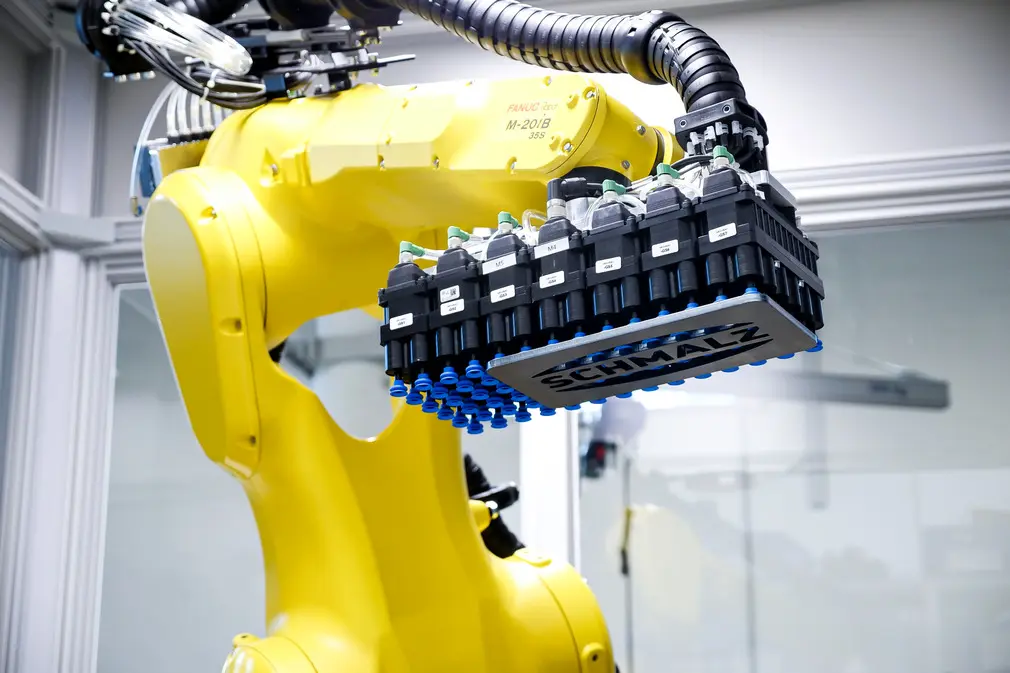
Greifen der Werkstücke mit Vakuumtechnik
Sobald die Position der Werkstücke bekannt ist, kommt die Vakuumtechnik ins Spiel. End of Arm Tooling (EOAT) mit Vakuum-Sauggreifern heben die Werkstücke aus dem Bin. Diese Sauggreifer nutzen den Unterdruck, um die Objekte sicher und fest zu greifen, ohne sie zu beschädigen.
Die Flexibilität der Vakuumtechnik ermöglicht das Greifen unterschiedlichster Formen und Materialien, von empfindlichen Werkstücken bis hin zu schweren Komponenten.

Transport und Platzierung
Nach der Entnahme des Werkstücks wird es zum nächsten Bearbeitungs- oder Fertigungsschritt transportiert.
Der Roboter kann die Werkstücke entweder in einer bestimmten Reihenfolge oder entsprechend der jeweiligen Produktionsanforderung an den gewünschten Ort platzieren oder in einen Zielbehälter ablegen. Dies sorgt für eine reibungslose und effiziente Integration in den gesamten Produktionsprozess.
Optimierung durch KI und Maschinelles Lernen
Moderne Bin Picking-Systeme sind mit Algorithmen ausgestattet, die es dem System ermöglichen, sich kontinuierlich zu verbessern.
Maschinelles Lernen ermöglicht es dem Roboter, aus früheren Erfahrungen zu lernen und seine Greifstrategien zu optimieren. Dies führt zu einer höheren Effizienz, einer geringeren Fehlerquote und einer schnelleren Anpassung an neue Werkstücke oder variierende Bedingungen.
Vorteile von Bin Picking-Systemen
Durch den Einsatz von Vakuumtechnik und Bildverarbeitung sind Bin Picking-Systeme in der Lage, Werkstücke präzise zu greifen und zu platzieren. Diese Systeme können eine Vielzahl unterschiedlicher Objekte handhaben, unabhängig von ihrer Komplexität oder Geometrie.
Der automatisierte Entnahmeprozess reduziert nicht nur menschliche Fehler, sondern steigert auch die Produktionsgeschwindigkeit, was zu einer erheblichen Effizienzsteigerung führt.
Ein weiterer Vorteil dieser Technologie ist die Entlastung der Mitarbeiter, da wiederholte, körperlich anstrengende Tätigkeiten wie das manuelle Greifen von Objekten übernommen werden.
Dies fördert die Ergonomie am Arbeitsplatz, indem es den physischen Stress für die Mitarbeiter verringert und gleichzeitig die Arbeitsumgebung sicherer gestaltet.

Anwendungen
Bin Picking findet Anwendung in zahlreichen Branchen, darunter die Automobilindustrie, Elektronikfertigung, Lebensmittelindustrie und die Logistik.
In der Automobilbranche beispielsweise wird Bin Picking verwendet, um Werkstücke wie Schrauben, Dichtungen und andere Komponenten automatisch zu entnehmen und weiterzuverarbeiten.
In der Lebensmittelindustrie hilft die Technologie, lose Verpackungen oder Produkte wie Obst und Gemüse präzise zu handhaben.
Verwandte Begriffe
Weitere Informationen
EOAT: End-of-Arm-Tooling für Robotik und Automation
Rundum effizient greifen: EOAT-Lösungen von Schmalz für vielseitige, prozesssichere Handhabung in der Automation.
FAQ - Robotik - Cobots & Leichtbauroboter
Finden Sie hier Antworten auf Fragen zu automatisierten Prozessen mit Cobots und Vakuum-Greifern, sowie zur Auswahl Ihres Vakuum-Greifers und Erzeugers.