
Vakuum-Endeffektor VEE Konfigurationskonzept

Vakuum-Endeffektor VEE
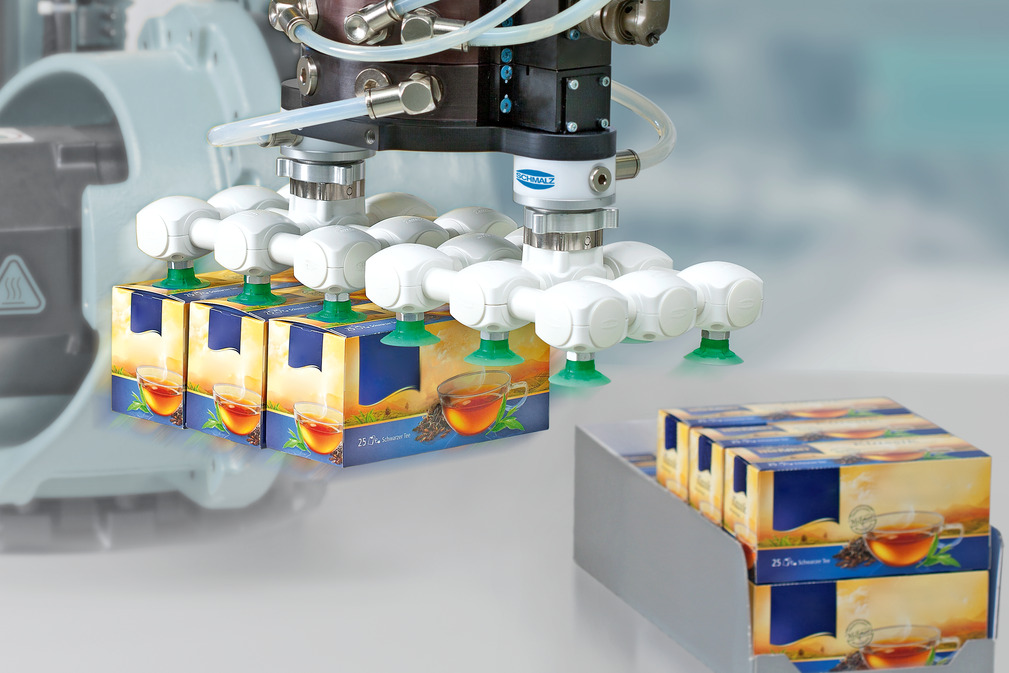
Der Vakuum-Endeffektor VEE beschreibt ein komplettes Greifsystem zum Einsatz in schnellen Pick & Place-Prozessen der Verpackungsbranche.
Die Vakuum-Endeffektoren realisieren in Verbindung mit Delta- und Scara-Robotern kürzeste Zykluszeiten. Die Endeffektoren sind für den Einsatz in Primär- und Sekundärverpackungsprozessen konzipiert. Beispielsweise zum automatisierten Befüllen von Kartons in Casepackern oder für Anwendungen in Toploading-Maschinen sowie in Karton- und Trayaufrichtern. Die Vakuum-Endeffektoren sind dank der Schnellwechseladapter ideal für den Einsatz in flexiblen Verpackungsmaschinen mit häufigen Formatwechseln.
Der Vakuum-Endeffektor basiert auf einem Baukasten. Dieser ermöglicht eine schnelle und kostengünstige Konfiguration.
.jpg)
.jpg)
Aufbau eines Vakuum-Endeffektors VEE
Die Vakuum-Endeffektoren VEE können aus aufeinander abgestimmten Baukastenelementen zusammengesetzt werden. Während der Konfiguration können die Anzahl der Saugstellen und die Abstände zwischen den Saugstellen variabel verändert werden. Damit wird der Endeffektor optimal an die Werkstückabmessungen angepasst. Die große Auswahl an Sauggreifertypen optimiert den Endeffektor für eine Vielzahl an Anwendungen.
Schmalz empfiehlt den Aufbau von Vakuum-Endeffektoren VEE innerhalb des folgenden Rahmens:
- Max. Werkstückabmessungen: 400x300 mm
- Max. Werkstückgewicht: 2.000 g
- Max. Sauggreiferanzahl: 12
- Max. Größe des Vakuum-Endeffektors: 350x250 mm
Grundelemente im Baukastensystem
.jpg)
Das Baukastensystem VEE besteht aus einer Vielzahl an Komponenten, die miteinander kombiniert werden können. Folgende Komponenten sind für den Aufbau erforderlich:
Flanschplatten
- Typenspezifische Flanschplatten und universelle Flanschplatte zur Anbindung des Vakuum-Endeffektors an den Roboter
- Schrauben zur Montage an den Vakuum-Endeffektor inklusive
Flanschmodule
- Manueller Schnellwechseladapter mit Bajonettverschluss inklusive Vakuum-Anschluss; werkzeuglose Anbindung an das Grundmodul
- Mit vertikalem und horizontalem Vakuum-Anschluss
- Nenndurchfluss 20 m³/h bzw. 60 m³/h
Grundmodule
- Basisbauteil zum Aufbau eines Vakuum-Endeffektors
- Werkzeuglose Anbindung an das Flanschmodul mittels Bajonettverschluss
- Zentrale Vakuum-Einspeisung
Sauggreifer
- Es können nahezu alle Sauger aus dem Schmalz-Produktprogramm verwendet werden.
Informationen zu den Layouts des Endeffektors
Grundsätzlich ist es mit dem VEE-Baukastensystem möglich, beliebige Varianten eines Endeffektors abzubilden. Die Anbindung an den Roboter ist bei jedem Layout im Mittelpunkt des Vakuum-Endeffektors (angedeutet durch den schwarzen Punkt in den 2D Skizzen). Die Endeffektoren sind alle symmetrisch aufgebaut.
Derzeit unterscheiden wir fünf grundlegende Arten dieser vorkonfigurierten Vakuum-Endeffektoren:



1. Layouts, die lediglich aus einem Grundmodul (VEE-QCF) bestehen




2. Layouts mit einem variablen Längenmaß




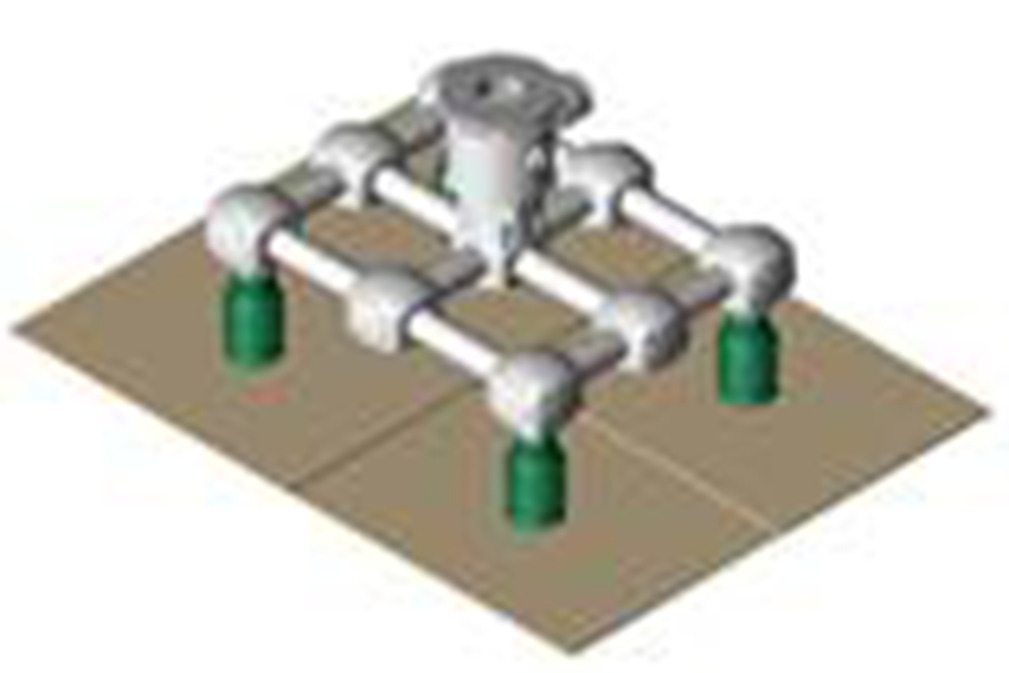
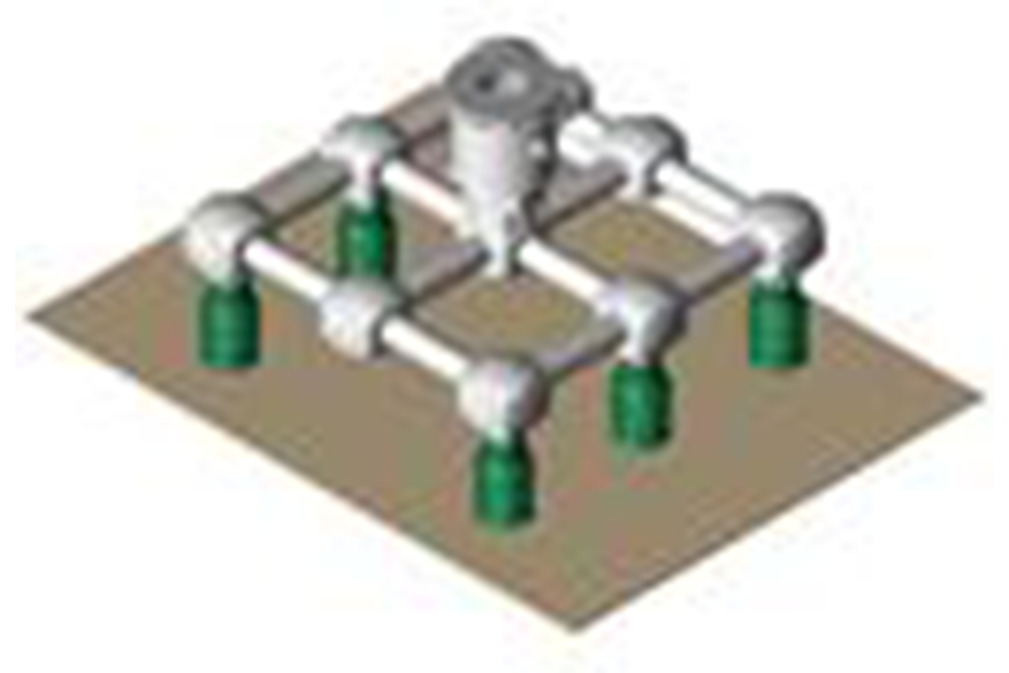
3. Layouts mit zwei variablen Längenmaßen



4. Layouts mit zwei variablen Längenmaßen und etwas komplexerem Aufbau



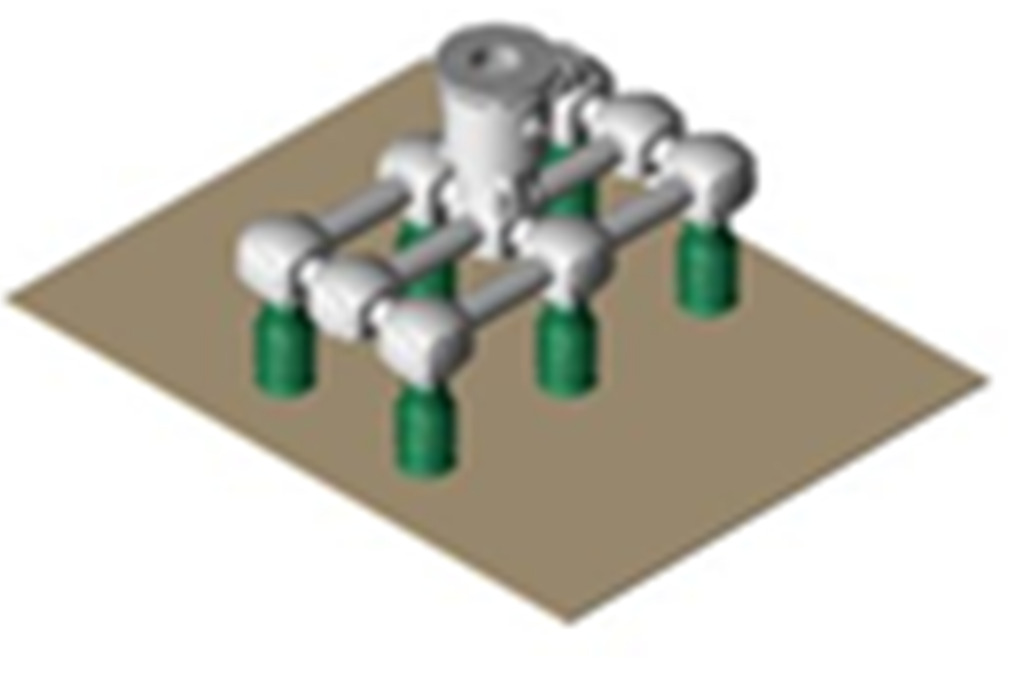
5. Layouts mit drei variablen Längenmaßen
Je nach Anforderung, Werkstückaufteilung, Werkstückgewicht, Transportgeschwindigkeit etc. wird bestimmt, welches der Layouts am besten geeignet ist. Anschließend kann dieses Layout entsprechend angepasst werden.
Informationen zur Werkstückdefinition
Der Vakuum-Endeffektor kann bei einem Pick-Vorgang mehrere Werkstücke aufnehmen.
Definition der Werkstücklage:
Gesamtlänge aller Werkstücke L [mm]: Alle Werkstücke eines Pick-Vorgangs inklusive des Abstands zwischen den einzelnen Werkstücken ergeben die Gesamtlänge. Diese darf 400 mm nicht überschreiten.
Gesamtbreite aller Werkstücke B [mm]: Alle Werkstücke eines Pick-Vorgangs inklusive des Abstands zwischen den einzelnen Werkstücken ergeben die Gesamtbreite. Diese darf 300 mm nicht überschreiten.
Gesamtgewicht aller Werkstücke [g]: Alle Werkstücke eines Pick-Vorgangs dürfen das maximale Gesamtgewicht von 2.000 g nicht überschreiten.

Beispiel 1:
Werkstückaufteilung bei 4 Werkstücken und gewähltem Layout 4

Beispiel 2:
Werkstückaufteilung bei 4 Werkstücken und gewähltem Layout 6
Es sollte darauf geachtet werden, dass die Werkstücke möglichst gleichmäßig unter den einzelnen Sauggreifern verteilt sind. Die Platzierung kann beeinflusst werden, indem die Längenmaße (L1, L2) verändert werden.

Längenanpassung des Vakuum-Endeffektors:
An folgendem Beispiel des Layouts 8 wird ersichtlich, welchen Einfluss die Anpassung der Längenmaße auf den Vakuum-Endeffektor hat:
Ausprägung 1:
L1: 50 mm
L2: 100 mm
Ausprägung 2:
L1: 100 mm
L2: 100 mm
Informationen zu den Sauggreifern
Die Vakuum-Endeffektoren VEE werden vorzugsweise im Verpackungsbereich eingesetzt und sind dank ihrer Merkmale hervorragend für die Anforderungen in den Verpackungsprozessen geeignet. Im Folgenden sind 6 verschiedene Sauggreifertypen aufgeführt, die besonders zur Handhabung von Verpackungen geeignet sind. Unser Produktprogramm umfasst eine Vielzahl an weiteren Sauggreifern, die in Kombination mit dem VEE verwendet werden können.

Beispiele: Beutel und flexible Verpackungen
Sauggreifer vom Typ SPB2f: Die Balgsauggreifer aus FDA-konformem Silikon eignen sich aufgrund der flexiblen und anpassungsfähigen Dichtlippe zur Handhabung von Beuteln auch mit starker Faltenbildung, geringem Füllgrad oder Schwenkbewegungen während des Handhabungsvorgangs. Durch die integrierte Abstützung werden selbst dünne und weiche Folien (LDPE) nicht eingezogen. Die Sauggreifer sind in den Durchmessern 30 mm bis 50 mm erhältlich.

Sauggreifer vom Typ SPB4f: Die Balgsauggreifer aus FDA-konformem Silikon eignen sich aufgrund der flexiblen und anpassungsfähigen Dichtlippe zur Handhabung von Beuteln auch mit starker Faltenbildung, geringem Füllgrad oder Schwenkbewegungen während des Handhabungsvorgangs. Durch die integrierte Abstützung werden selbst dünne und weiche Folien (LDPE) nicht eingezogen. Die Sauggreifer sind in den Durchmessern 30 mm bis 50 mm erhältlich

Sauggreifer vom Typ SPB4: Die Balgsauggreifer aus fda-konformem Silikon eignen sich aufgrund der verstärkten Bauform und der weichen Dichtlippe besonders zur Handhabung von formlabilen Verpackungen wie Beutel und Folien. Die Sauggreifer sind in den Durchmessern 20 mm bis 50 mm erhältlich.

Cardboard and stable packaging:
Sauggreifer vom Typ SPF: Die Flachsauggreifer aus dem Spezialwerkstoff Elastodur mit Stützrippen, verstärktem Grundkörper, flexibler Dichtlippe und geringem inneren Volumen eignen sich besonders für die Handhabung von eigenstabilen Verpackungen wie Kartonagen.

Sauggreifer vom Typ SPB1: Die Balgsauggreifer aus dem Spezialwerkstoff Elastodur eignen sich durch den verstärkten Grundkörper, den großen Saugerhub und dem Dämpfungseffekt besonders für die Handhabung von eigenstabilen Verpackungen wie beispielsweise Kartonagen. Die Sauggeifer sind in den Durchmessern 10 mm bis 60 mm erhältlich.

Sauggreifer vom Typ SPB2: Die Balgsauggreifer aus dem Spezialwerkstoff Elastodur eignen sich aufgrund der flexiblen und anpassungsfähigen Dichtlippe und dem großen Saugerhub besonders zur Handhabung von eigenstabilen Verpackungen wie beispielsweise Kartonagen. Die Sauggreifer sind in den Durchmessern 20 mm bis 50 mm erhältlich.
Informationen zum Vakuum-Modul
Die Vakuum-Module ermöglichen eine energieeffiziente pneumatische und elektrische Vakuum-Erzeugung direkt am Greifer. Die pneumatischen Vakuum-Module zeichnen sich durch eine hohe Saugleistung bei geringem Luftverbrauch aus und garantieren durch den Bajonettverschluss einen schnellen und werkzeuglosen Wechsel, sowie eine einfache und schnelle Reinigung des Vakuum Endeffektors.
Die elektrischen Vakuum-Module (CobotPump) benötigen lediglich ein Strom- bzw. Datenkabel für den Betrieb. Ein Vakuum- oder Druckluftschlauch von Roboter zu Vakuum-Modul ist nicht erforderlich.
Pneumatische Module mit unterschiedlichen Düsengrößen, jeweils mit/ohne Schalldämpfer:
- VEE-QCMV HF 2 13 22 SD mit ecoPump SEP Düse 1,3 mm und Schalldämpfer
- VEE-QCMV HF 2 13 22 mit ecoPump SEP Düse 1,3 mm ohne Schalldämpfer
- VEE-QCMV HV 2 07 13 mit ecoPump SEP Düse 0,7 mm ohne Schalldämpfer
- VEE-QCMV HV 2 07 13 SD mit ecoPump SEP Düse 0,7 mm und Schalldämpfer
Elektrische Module (CobotPump):
- ECBPi 12 24V-DC M12-8, CobotPump mit Steckeranschluss M12-8
- ECBPi 12 24V-DC TB-8, CobotPump mit Klemmleisten-Anschluss
Informationen zur Flanschplatte
Die Flanschplatten dienen zur Anbindung des Vakuum-Endeffektors an den Roboter. Zur Verfügung stehen verschiedene Flanschplatten. Unsere erfahrenen Systemberater unterstützen Sie gerne, falls Sie Ihre gewünschte Flanschplatte nicht finden können.
Flanschplatten für pneumatische Vakuum-Module
| Typ | Artikelnummer | Für Robotertyp | Gewicht [kg] |
|---|---|---|---|
| FLAN-PL 63x11.5-UNI | 10.01.30.00017 | Universalflansch zur Nachbearbeitung (kundenspezifische Lösungen) | 0,068 |
| FLAN-PL 55x7.5-AB1 | 10.01.30.00015 | ABB IRB 360 Flexpicker (außer IRB 360-6/1600) Fanuc-Parallel-Link M-1iA Fanuc M-2iA |
0,037 |
| FLAN-PL 63x10.5-AD1 | 10.01.30.00016 | ADEPT QUATTRO s650 | 0,065 |
| FLAN-PL 55x9.5-JP1 | 10.01.30.00194 |
Fanuc M-3iA, CR-4iA, CR-7iA, CR-15iA, CR-35iA |
0,035 |
| FLAN-PL-55x7.5-EL1 | 10.01.30.00208 | Elau (Schneider Electric) Robot P4 | 0,048 |
| FLAN-PL 80x9-ST1 | 10.01.30.00167 | Stäubli TS40, TS60 und TS80 | 0,130 |
| FLAN-PL 63.5x10 AL-EL VEE | 10.01.30.00806 | Universal Robots UR 3, 5, 10 Kuka iiwa 7, 14 |
0,060 |
Flanschplatten für elektrische Vakuum-Module
| Typ | Artikelnummer | Für Robotertyp | Gewicht (kg) |
|---|---|---|---|
| FLAN-PL-UR-KUK-1 | 10.03.01.00313 | Universal Robots UR 3, 5, 10 | 0,08 |
| KUKA iiwa 7, 14 | |||
| AUBO i3, i7, i10 | |||
| MABI SPEEDY 6, SPEEDY 12 | |||
| Stäubli TX290, RX160 (nur für ECBPi) | |||
| FLAN-PL-RET-1 | 10.03.01.00358 | Rethink Robotics - Modell Saywer (ohne ClickSmartAdapter) | 0,1 |
| FLAN-PL-RET-2 | 10.03.01.00373 | Rethink Robotics - Modell Saywer (mit ClickSmartAdapter) | 0,09 |
| FLAN-PL-FAN-1 | 10.03.01.00390 | FANUC CR-4iA, CR-7iA, CR-7iA/L | 0,14 |
| KAWASAKI duAro2 | |||
| MITSUBISHI Melfa RV-2FRL(B), RV-4FRLM, RV-7FRM, RV-7FRLM, RV-7FRLLM | |||
| OMRON Viper 650, Viper 850 (articulated robots) | |||
| FLAN-PL-FAN-2 | 10.03.01.00518 | FANUC CR15iA | 0,19 |
| FLAN-PL-YAS-2 | 10.03.01.00404 | YASKAWA Motoman HC10 | 0,22 |
| FLAN-PL-YAS-3 | 10.03.01.00471 | YASKAWA Motoman HC10DT | 0,25 |
| FLAN-PL-ECBPI | 10.03.01.00379 | Universalanbindung mit G1/4" Innengewinde, die an der Unterseite der ECBPi montiert wird (saugerseitig) | 0,23 |
Informationen zum Flanschmodul
Die Flanschmodule ermöglichen den Betrieb des Vakuum-Endeffektors mit Mehrstufenejektoren (mehrstufige Venturi-Düsen) oder Seitenkanalverdichtern. Der Wechseladapter mit Bajonettverschluss garantiert einen schnellen, werkzeuglosen Wechsel des Vakuum-Endeffektors. Zur Verfügung stehen drei verschiedene Flanschmodule mit unterschiedlichem Nenndurchfluss:
- VEE-QCM 30 mit Nenndurchfluss 60 m³/h zur vertikalen Vakuum-Einspeisung
- VEE-QCM 51 mit Nenndurchfluss 20 m³/h zur horizontalen Vakuum-Einspeisung
- VEE-QCM 65 mit Nenndurchfluss 60 m³/h zur horizontalen Vakuum-Einspeisung
Informationen zur Flanschverlängerung
Die Flanschverlängerungen bieten die Möglichkeit zum Eintauchen in Kartons, Boxen oder Kisten. Auch hier bildet der Wechseladapter mit Bajonettverschluss die Schnittstelle zum Vakuum-Endeffektor.
Zur Verfügung stehen drei verschiedene Flanschverlängerungen mit unterschiedlicher Länge:
- VEE-FE 25.4x79.5 mit einer Gesamtlänge von 79.5 mm
- VEE-FE 25.4x129.5 mit einer Gesamtlänge von 129.5 mm
- VEE-FE 25.4x179.5 mit einer Gesamtlänge von 179.5 mm
Informationen zum Abblasventil
Über ein Elektromagnetventil können, in automatisierten Anwendungen, Abblasimpulse zum schnellen Ablegen des Werkstücks an den Vakuum-Endeffektor angelegt werden.

Kontakt
Družstevní 2169
75301 Hranice